- 项目要求
- 所需要的元器件
- A4988步进驱动 与2相4线 42步进电机接线
- 所需要的元器件
- (第一种方法)不用定时器驱动42步进电机
- (第二种方法)用定时器驱动42步进电机
- 通过外部中断对电机进行停止
- 上位机控制电机开启关闭
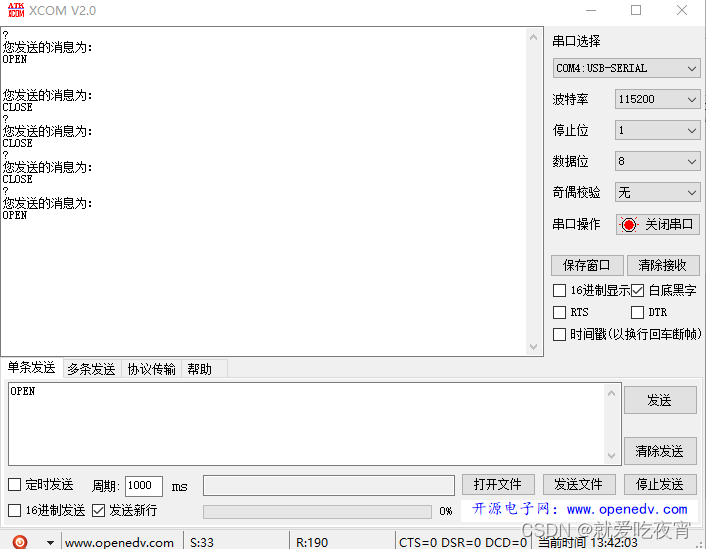
- 上位机发送命令效果
- 示波器波形展示
项目要求
本项目通过stm32f1为核心的最小系统板控制42步进电机,可以通过按键的开关对电机进行实时的控制,也可以通过上位机发送的串口命令对电机进行控制,本项目用到了定时器、外部中断、串口收发等。
所需要的元器件
1、STM32F103C8T6最小系统核心板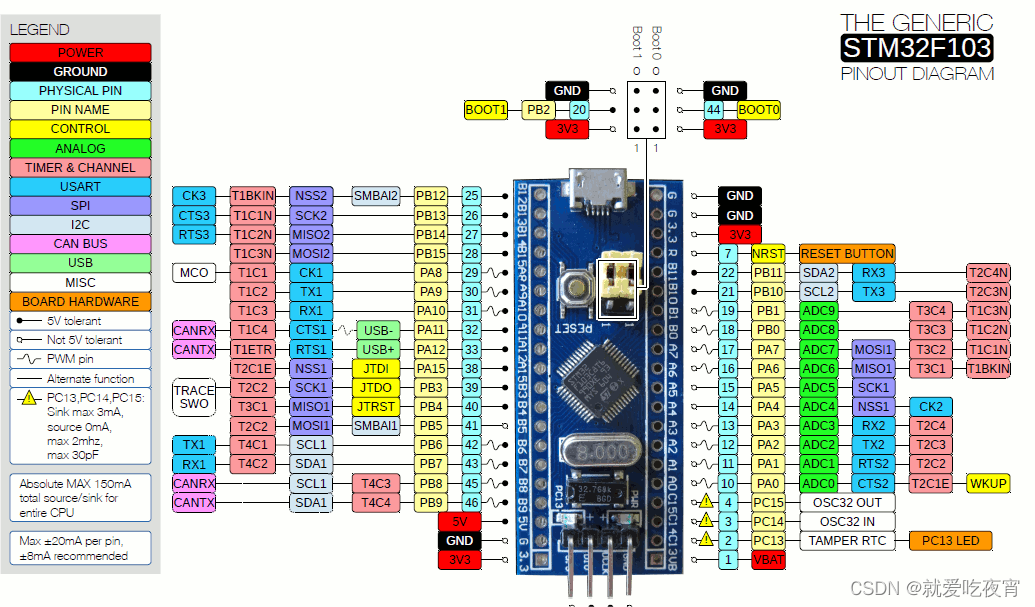
2、A4988步进驱动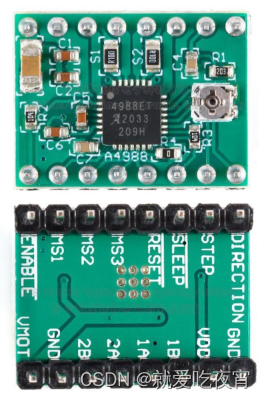
3、2相4线 42步进电机
4、2个微动开关(分别负责控制电机开始和停止)

5、12V的电源
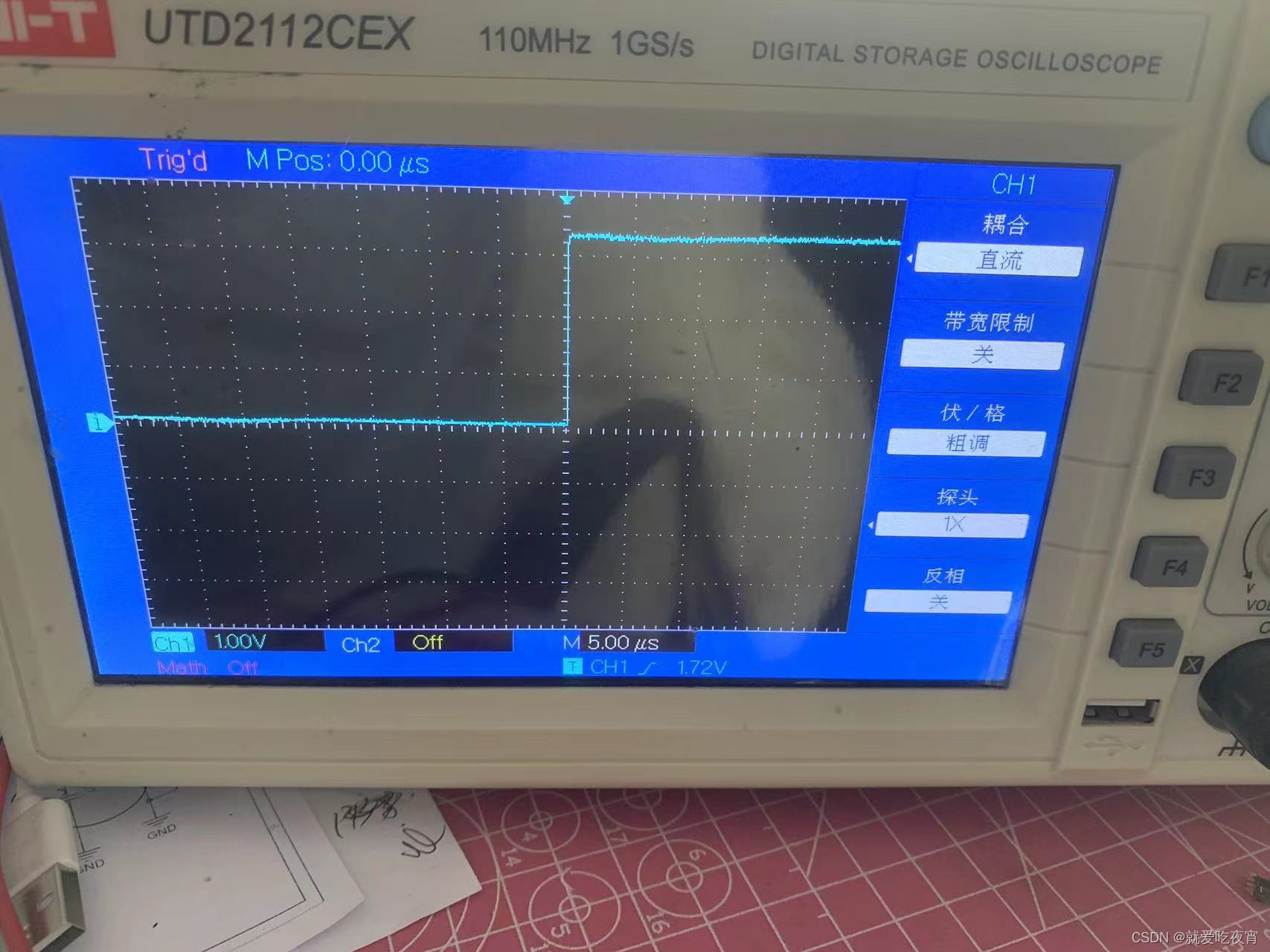
6、检测电机输出波形的示波器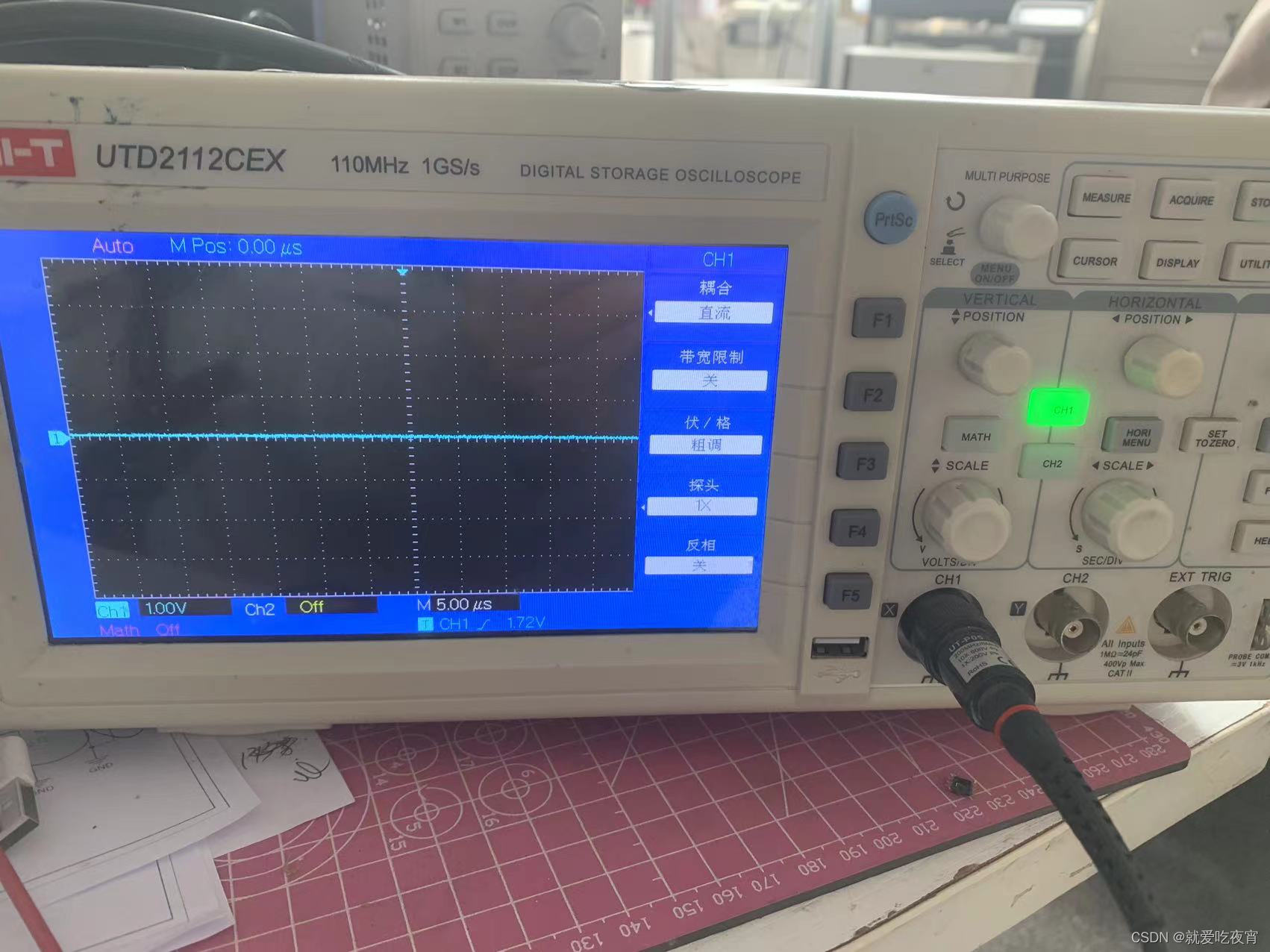
A4988步进驱动 与2相4线 42步进电机接线
A4988步进驱动 2相4线 42步进电机
A4988步进驱动接线定义:
A4988
开发板GND --GND DIR-- PB9方向
开发板3.3V --VDD STEP-- PB5脉冲信号
A --1B SLEEP-- VCC3.3V
C --1A RESET-- VCC3.3V
D --2A MS3-- PB12
B --2B MS2-- PB11
外接电源GND --GND MS1-- PB10
外接电源VCC --VMOT ENABLE-- PB13控制抱死
(第一种方法)不用定时器驱动42步进电机
下面展示一些 内联代码片。
// A code block
var foo = 'bar';
// An highlighted block
//参数
dir:FALSE正转TRUE反转
//period 周期
//step 脉冲
void Step_Control(u8 dir,u16 period,u32 steps)
{
u32 i;
for(i=0; i <= steps;i++)
{
DIR = dir;
STEP = 1;
delay_us(1);
STEP = 0;
delay_us(period);
}
}
第一种方法,我们利用for循环发出脉冲信号,通过控制period和steps参数控制,电机运转的时长,这种方式简单,但是会出现问题,就是当我们控制电机运转时,无法通过串口发送”CLOSE“停止命令。因为程序在执行for循环无法打断。
(第二种方法)用定时器驱动42步进电机
下面展示一些 内联代码片。
// A code block
var foo = 'bar';
// An highlighted block
#include "timer.h"
#include "usart.h"
//V1.1 20120904
//1,增加TIM3_PWM_Init函数。
//2,增加LED0_PWM_VAL宏定义,控制TIM3_CH2脉宽
//
//通用定时器3中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3!
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
}
//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
}
}
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB8
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.8
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
//TIM_Cmd(TIM3, ENABLE); //使能TIM3
TIM_Cmd(TIM3, DISABLE); //不使能TIM3
}
在这里我们通过定时器3,对PB5输出大小为50Mhz的方波,对steps引脚进行驱动,这种方式的好处就是,即使电机在运转,也可以通过上位机发送命令。
上位机控制电机开启关闭
下面展示一些 内联代码片。
// A code block
var foo = 'bar';
// An highlighted block
void Send_data_control()
{
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff;//得到接收到的数据长度
printf("\r\n您发送的消息为:\r\n\r\n");
for(t=0;t<len;t++)
{
USART_SendData(USART1,USART_RX_BUF[t]);//向串口1发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);
}
printf("\r\n\r\n");
USART_RX_STA=0;
if(!(strcmp((char*)USART_RX_BUF,"OPEN")))
{
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
if(!(strcmp((char*)USART_RX_BUF,"CLOSE")))
{
NVIC_SystemReset(); // 执行软复位,重新启动处理器
}
}
}
直接通过使能定时器3,来开启电机运转
通过外部中断对电机进行停止
下面展示一些 内联代码片。
// A code block
var foo = 'bar';
// An highlighted block
// 外部中断处理函数
void EXTI4_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line4) != RESET)
{
// 处理外部中断事件
// ...
EXTI_ClearITPendingBit(EXTI_Line4); // 清除中断标志位
NVIC_SystemReset(); // 执行软复位,重新启动处理器
}
}
上位机发送命令效果
 文章来源:https://uudwc.com/A/3wB5g
文章来源:https://uudwc.com/A/3wB5g
示波器波形展示
本项目开源,有需要借鉴的可以评论,发链接。文章来源地址https://uudwc.com/A/3wB5g