文章目录
- 前言
- 一、PCA9685是什么?
-
二、使用步骤
- 1.引入库
- 2.接线
- 3.代码
- 4.讲解
一、PCA9685是什么?
舵机驱动板也可以生成PWM波控制LED等,但也仅仅只是一个驱动板,我们还需要一个控制板,ESP32是个不错的选择,ESP32CAM也是,但ESP32CAM没有引出I2C的引脚,需要自己去设置。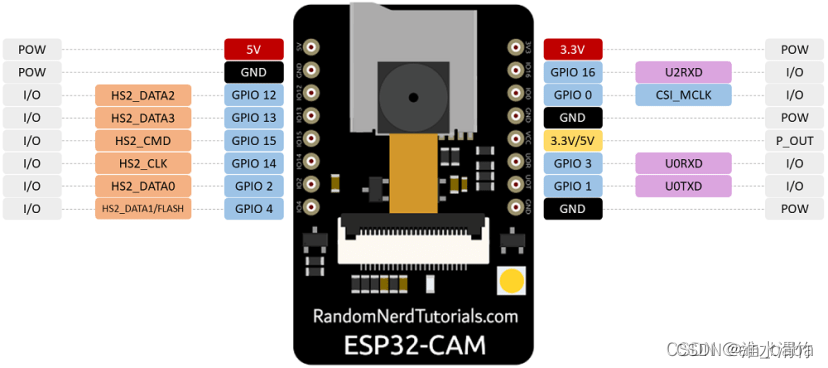
这个图是随便找的,大家可以看到没有,ESP32有的但也只有一个引出来,如果有多个I2C设备,这个设置就起到了很关键的作用,接下来我会为大家讲解。
二、使用步骤
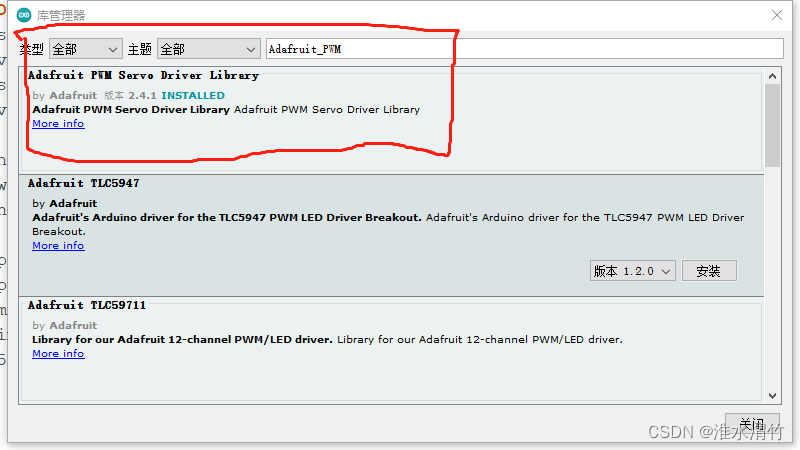
1.引入库
Adafruit_PWMServoDriver.h
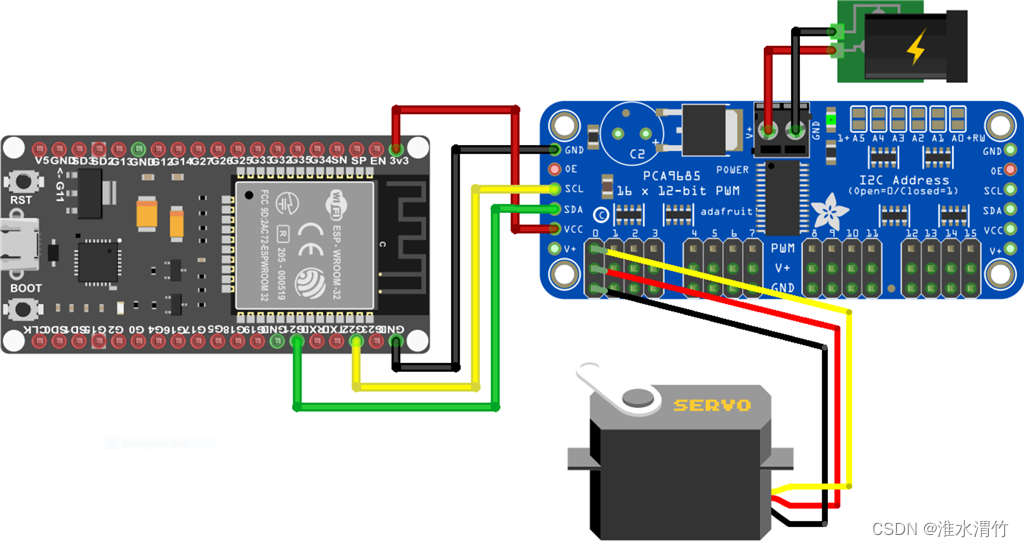
2.接线
这个是找的图,如果不额外皆电源的化,记得PCA9685的V+接3v,VCC接5V
3.代码
代码如下(示例):
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
#define SDA 32
#define SCL 33
// called this way, it uses the default address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x40,Wire);
#define SERVO_FREQ 50
float mapTo(float val, float I_Min, float I_Max, float O_Min, float O_Max){
return(((val-I_Min)*((O_Max-O_Min)/(I_Max-I_Min)))+O_Min);
}
int ts(int angle){
float an = mapTo((float)angle,0,180,0.5,2.5);
int re = an/20*4096;
Serial.println(re);
return re;
}
void setup() {
Serial.begin(115200);
Wire.begin(SDA,SCL,100000);
pwm.begin();
pwm.setPWMFreq(SERVO_FREQ);
delay(10);
}
void loop() {
if(Serial.available())
{
int rev=Serial.parseInt();
Serial.print("rev=");
Serial.println(rev);
pwm.setPWM(0, 0, ts(rev));
}
}讲解:
自定义引脚,GPIO22接PCA9685的SDA,GPIO22接PCA9685的SCL
#define SDA 32
#define SCL 33把I2C进行配置文章来源:https://uudwc.com/A/9L1Jj
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x40,Wire);文章来源地址https://uudwc.com/A/9L1Jj

