文章目录
- 一、 rpy角转换为旋转矩阵
- 二、 旋转矩阵转换为rpy角
- 三、 小结
根据绕轴旋转的次序不同,易知姿态的rpy(roll, pitch, yaw)表示总共有12种,分别为:XYZ, XZY, XYX, XZX; YXZ, YZX, YXY, YZY; ZXY, ZYX, ZXZ, ZYZ。同样的,姿态的欧拉角表示也有12种。在实际应用中,没必要掌握所有情况,只需认准一种,能够实现rpy角与旋转矩阵之间的转换即可。姿态的rpy表示中,ZYX最为常见,下面推导该情况下,rpy角与旋转矩阵之间的转换。
一、 rpy角转换为旋转矩阵
ZYX rpy角转换为旋转矩阵:
R
=
R
o
t
z
(
c
)
∗
R
o
t
y
(
b
)
∗
R
o
t
x
(
a
)
(1)
R = Rotz(c)*Roty(b)*Rotx(a) \tag 1
R=Rotz(c)∗Roty(b)∗Rotx(a)(1)
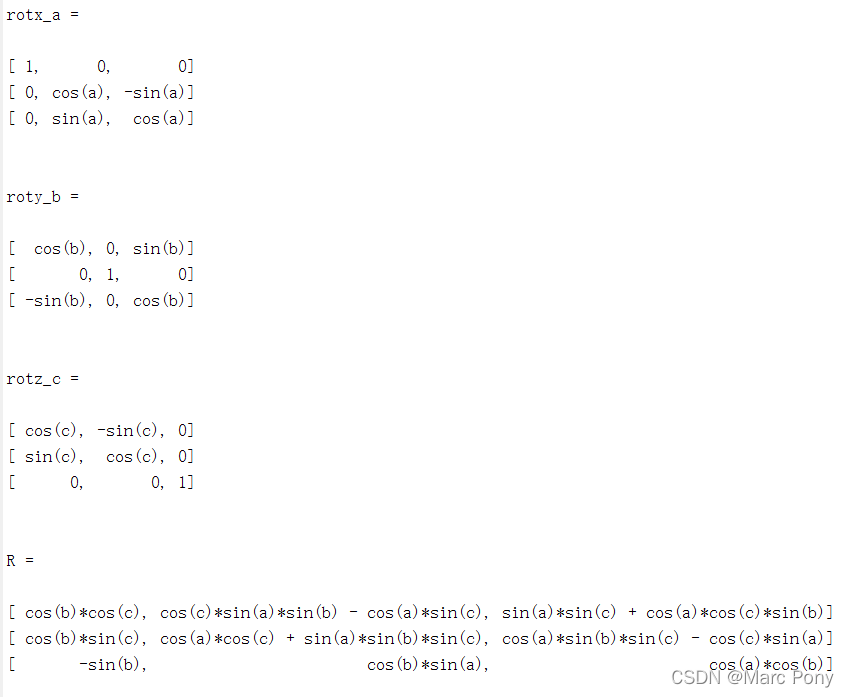
符号表达式MATLAB代码:
clc
clear
syms a b c real;
rotx_a = [sym(1), sym(0), sym(0)
sym(0), cos(a), -sin(a)
sym(0), sin(a), cos(a)]
roty_b = [cos(b), sym(0), sin(b)
sym(0), sym(1), sym(0)
-sin(b), sym(0), cos(b)]
rotz_c = [cos(c), -sin(c), sym(0)
sin(c), cos(c), sym(0)
sym(0), sym(0), sym(1)]
R = rotz_c * roty_b * rotx_a
b = sym(-pi/2);
simplify(eval(R))
b = sym(pi/2);
simplify(eval(R))
二、 旋转矩阵转换为rpy角
设已知旋转矩阵:
R
=
[
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
]
(2)
R = \left[ \begin{matrix} r_{11} & r_{12} & r_{13} \\ r_{21} &r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \\ \end{matrix} \tag 2 \right]
R=⎣⎡r11r21r31r12r22r32r13r23r33⎦⎤(2)
设rpy角
a
,
b
,
c
∈
[
−
π
,
π
]
a,b,c\in[-\pi,\pi]
a,b,c∈[−π,π],根据旋转矩阵关于rpy角
a
,
b
,
c
a,b,c
a,b,c的解析表达式,以最简单一项(
r
31
r_{31}
r31)为突破口。
1)若
r
31
=
1
r_{31}=1
r31=1,则
b
=
−
π
/
2
b=-\pi/2
b=−π/2,此时有:
R
=
[
0
−
s
i
n
(
a
+
c
)
−
c
o
s
(
a
+
c
)
0
c
o
s
(
a
+
c
)
−
s
i
n
(
a
+
c
)
1
0
0
]
(3)
R = \left[ \begin{matrix} 0 & -sin(a+c) & -cos(a+c) \\ 0 & cos(a+c) & -sin(a+c) \\ 1 & 0 &0 \\ \end{matrix} \tag 3 \right]
R=⎣⎡001−sin(a+c)cos(a+c)0−cos(a+c)−sin(a+c)0⎦⎤(3)
姿态奇异,无法计算
a
,
c
a,c
a,c,只能计算
a
+
c
a+c
a+c。
取
a
=
0
a=0
a=0,则有:
{
r
12
=
−
s
i
n
(
c
)
r
13
=
−
c
o
s
(
c
)
(4)
\begin{cases} r_{12}=-sin(c)\\ r_{13}=-cos(c)\\ \tag 4 \end{cases}
{r12=−sin(c)r13=−cos(c)(4)
故有:
c
=
a
t
a
n
2
(
−
r
12
,
−
r
13
)
(5)
c=atan2(-r_{12},-r_{13}) \tag 5
c=atan2(−r12,−r13)(5)
2)若
r
31
=
−
1
r_{31}=-1
r31=−1,则
b
=
π
/
2
b=\pi/2
b=π/2,此时有:
R
=
[
0
s
i
n
(
a
−
c
)
c
o
s
(
a
−
c
)
0
c
o
s
(
a
−
c
)
−
s
i
n
(
a
−
c
)
−
1
0
0
]
(6)
R = \left[ \begin{matrix} 0 & sin(a-c) & cos(a-c) \\ 0 & cos(a-c) & -sin(a-c) \\ -1 & 0 &0 \\ \end{matrix} \tag 6 \right]
R=⎣⎡00−1sin(a−c)cos(a−c)0cos(a−c)−sin(a−c)0⎦⎤(6)
姿态奇异,无法计算
a
,
c
a,c
a,c,只能计算
a
−
c
a-c
a−c。
取
a
=
0
a=0
a=0,则有:
{
r
12
=
s
i
n
(
−
c
)
=
−
s
i
n
(
c
)
r
13
=
c
o
s
(
−
c
)
=
c
o
s
(
c
)
(7)
\begin{cases} r_{12}=sin(-c)=-sin(c)\\ r_{13}=cos(-c)=cos(c)\\ \tag 7 \end{cases}
{r12=sin(−c)=−sin(c)r13=cos(−c)=cos(c)(7)
故有:
c
=
a
t
a
n
2
(
−
r
12
,
r
13
)
(8)
c=atan2(-r_{12},r_{13}) \tag 8
c=atan2(−r12,r13)(8)
3)若
r
31
≠
±
1
r_{31}\ne\pm1
r31=±1,则
b
≠
±
π
/
2
b\ne\pm \pi/2
b=±π/2,
c
o
s
(
b
)
≠
0
cos(b)\ne0
cos(b)=0。
a
,
c
a,c
a,c的一个解:
{
a
=
a
t
a
n
2
(
r
32
,
r
33
)
c
=
a
t
a
n
2
(
r
21
,
r
11
)
(9)
\begin{cases} a= atan2(r_{32},r_{33})\\ c= atan2(r_{21},r_{11})\\ \tag 9 \end{cases}
{a=atan2(r32,r33)c=atan2(r21,r11)(9)
a
,
c
a,c
a,c的另一个解:
{
a
=
a
t
a
n
2
(
−
r
32
,
−
r
33
)
c
=
a
t
a
n
2
(
−
r
21
,
−
r
11
)
(10)
\begin{cases} a=atan2(-r_{32},-r_{33})\\ c= atan2(-r_{21},-r_{11}) \\ \tag {10} \end{cases}
{a=atan2(−r32,−r33)c=atan2(−r21,−r11)(10)
若
∣
c
o
s
(
c
)
∣
>
∣
s
i
n
(
c
)
∣
|cos(c)|>|sin(c)|
∣cos(c)∣>∣sin(c)∣,
b
=
a
t
a
n
2
(
−
r
31
,
r
11
/
c
o
s
(
c
)
)
(11)
b=atan2(-r_{31},r_{11}/cos(c)) \tag {11}
b=atan2(−r31,r11/cos(c))(11)
否则,
b
=
a
t
a
n
2
(
−
r
31
,
r
21
/
s
i
n
(
c
)
)
(12)
b=atan2(-r_{31},r_{21}/sin(c)) \tag {12}
b=atan2(−r31,r21/sin(c))(12)文章来源:https://uudwc.com/A/B60W
%{
Function: rpy2rotm
Description: rpy转旋转矩阵R, R= rotz(c) * roty(b) * rotx(a)
Input: rpy角度(单位rad)
Output: 旋转矩阵R
Author: Marc Pony(marc_pony@163.com)
%}
function R = rpy2rotm(rpy)
a = rpy(1);
b = rpy(2);
c = rpy(3);
sinA = sin(a);
cosA = cos(a);
sinB = sin(b);
cosB = cos(b);
sinC = sin(c);
cosC = cos(c);
R = [cosB*cosC, cosC*sinA*sinB - cosA*sinC, sinA*sinC + cosA*cosC*sinB
cosB*sinC, cosA*cosC + sinA*sinB*sinC, cosA*sinB*sinC - cosC*sinA
-sinB, cosB*sinA, cosA*cosB];
end
%{
Function: rotm2rpy
Description: 旋转矩阵R转rpy, R= rotz(c) * roty(b) * rotx(a)
Input: 旋转矩阵R
Output: rpy角度(单位rad)
Author: Marc Pony(marc_pony@163.com)
%}
function rpy = rotm2rpy( R )
if abs(R(3 ,1) - 1.0) < 1.0e-15 % singularity
a = 0.0;
b = -pi / 2.0;
c = atan2(-R(1, 2), -R(1, 3));
elseif abs(R(3, 1) + 1.0) < 1.0e-15 % singularity
a = 0.0;
b = pi / 2.0;
c = -atan2(R(1, 2), R(1, 3));
else
a = atan2(R(3, 2), R(3, 3));
c = atan2(R(2, 1), R(1, 1));
% a = atan2(-R(3, 2), -R(3, 3)); %a另一个解
% c = atan2(-R(2, 1), -R(1, 1)); %c另一个解
cosC = cos(c);
sinC = sin(c);
if abs(cosC) > abs(sinC)
b = atan2(-R(3, 1), R(1, 1) / cosC);
else
b = atan2(-R(3, 1), R(2, 1) / sinC);
end
end
rpy = [a, b, c];
end
clc
clear
n = 0;
while 1
rpy = -pi + 2*pi * rand(1, 3);
%rpy(2) = -pi/2; %奇异:+-pi
R = rotz(rpy(3)) * roty(rpy(2)) * rotx(rpy(1));
rpy1 = rotm2rpy(R);
R1 = rpy2rotm(rpy1);
rpy2 = rotm2rpy(R1);
R2 = rpy2rotm(rpy2);
if sum(sum(abs(R - R1))) > 1.0e-8 || sum(sum(abs(R - R2))) > 1.0e-8 || sum(sum(abs(R1 - R2))) > 1.0e-8
break;
end
% 同样旋转矩阵R可能对应不同的rpy角度
% if sum(abs(rpy - rpy1)) > 1.0e-8 || sum(abs(rpy - rpy2)) > 1.0e-8 || sum(abs(rpy1 - rpy2)) > 1.0e-8
% break;
% end
n = n + 1
end
三、 小结
(1)旋转矩阵中,当
r
31
=
1
或
−
1
r_{31}=1或-1
r31=1或−1时,姿态奇异,只能计算
a
+
c
或
a
−
c
a+c或a-c
a+c或a−c的值,此时通常的做法是令
a
=
0
a=0
a=0。
(2)当
r
31
≠
±
1
r_{31}\ne\pm1
r31=±1时,rpy角有两组解。类似地,当旋转矩阵用轴角表示时,有两组解:绕轴
k
k
k旋转
θ
\theta
θ角度与绕轴
−
k
-k
−k旋转
−
θ
-\theta
−θ角度;当旋转矩阵用单位四元数表示时,有两组解:单位四元数
q
q
q与单位四元数的相反数
−
q
-q
−q。因而,在姿态的单位四元数SLERP插补中,有必要选取较短的“姿态路径”,使得机器人姿态动作看起来柔顺一些。
(3)当
r
31
=
1
或
−
1
r_{31}=1或-1
r31=1或−1时,一个旋转矩阵对应无穷多组rpy角。当
r
31
≠
±
1
r_{31}\ne\pm1
r31=±1时,一个旋转矩阵对应两组rpy角。由于通常姿态插补为轴角插补或单位四元数SLERP插补,rpy角只作界面显示,在实际编程中,当姿态不奇异时,只需考虑一组解即可。机器人末端姿态的旋转矩阵R通过正解得到,旋转矩阵转换成rpy显示在界面上,上位机下发rpy角后,将rpy角转换成旋转矩阵R,再用轴角插补或单位四元数SLERP插补。也就是说,只要保证程序中的rpy角与旋转矩阵之间的变换关系是一一对应就可以,不需要也没必要去讨论选取哪一组rpy角。
姿态插补中,RPY与旋转矩阵R之间转换的一个坑:
轴角插补或单位四元数插补后,将轴角或单位四元数转换为旋转矩阵R,再把位置插补的位置XYZ合起来,写成一个4*4的齐次变换矩阵,作为机器人逆解的位姿输入。
有时候,为了节省内存空间,将旋转矩阵R转换为RPY角,再把位置插补的位置XYZ合起来,写成一个6维向量,作为机器人逆解的位姿输入(注意:做逆解时需要将RPY转换为旋转矩阵R)。
如果轴角或单位四元数转换为旋转矩阵R时,均为单精度浮点运算,导致旋转矩阵R丢失了些精度。由于RPY的姿态表示方法存在姿态奇异(万向节锁),当旋转矩阵R转换为RPY角时,在奇异点附近计算的 RPY角误差比较大,从而导致RPY转换而成的旋转矩阵R跳变。
如何避坑:
(1)轴角/单位四元数 -> 旋转矩阵 -> RPY -> 旋转矩阵,均采用双精度浮点数运算。
(2)旋转矩阵转换为RPY时,判断奇异点的容差值尽可能小。文章来源地址https://uudwc.com/A/B60W