SLAM ORB-SLAM2(1)总体框架
- 1. 简介
- 2. 框架
- 3. TRACKING
- 4. LOCAL MAPPING
- 5. LOOP CLOSING
- 6. MAP
1. 简介
ORB-SLAM2 是一个实时和完整的视觉SLAM系统(包括闭环检测、重定位、地图重用等功能)
提供了利用单目、双目以及RGB-D相机完成稀疏三维重建的功能和接口
2. 框架
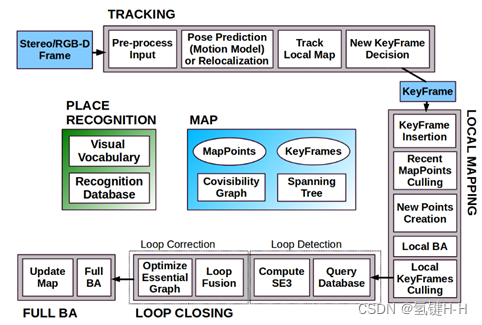
总体来说,ORB-SLAM2有三个并行的线程
3. TRACKING
用于 相机的 运动轨迹跟踪文章来源:https://uudwc.com/A/DN2ga
它提取输入的每帧图像(Frane)进行预处理(Pre-Process Input)提取ORB特征点
根据前后两帧的数据进行相机位姿估计(Pose Predictionor)
与 局部地文章来源地址https://uudwc.com/A/DN2ga