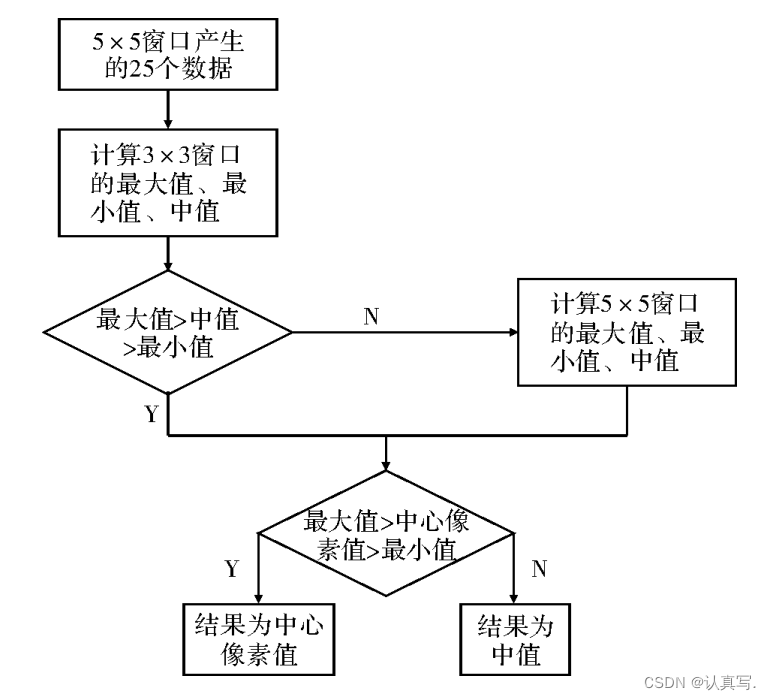
1. 算法原理流程图
自适应中值滤波硬件框图如下。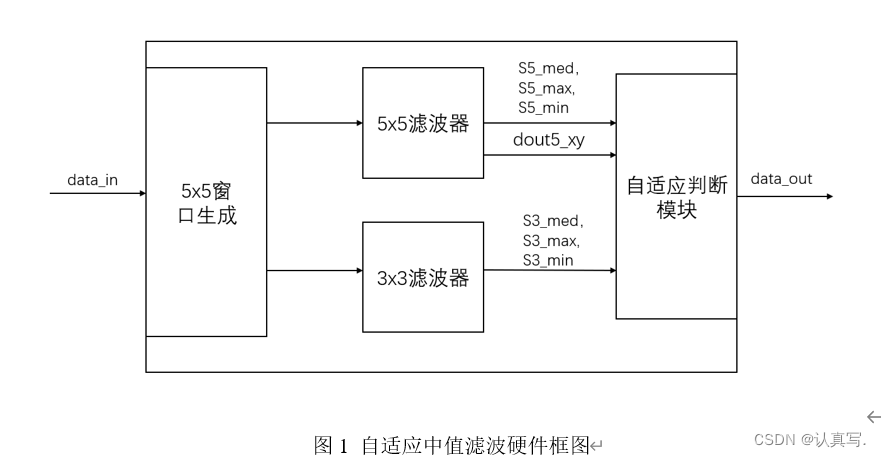
2. 5x5窗口产生
3x3窗口中值滤波参考比较多,这里不做介绍。
图像数据是一个一个输入进来的,要实现5x5的模板,就首先必须要保证能同时能对5行图像数据进行获取,这样就必须要对图像数据进行行缓存,咋一看,5x5模板需要缓存5行,其实不然,缓存4行后,接下来输入进来的数据就是第5行的数据了,这样就实现了5行数据同时存在的情况了,对行缓存区的要求是左端进入一个数据,右端出来一个数据,这个要求与移位寄存器有些类似。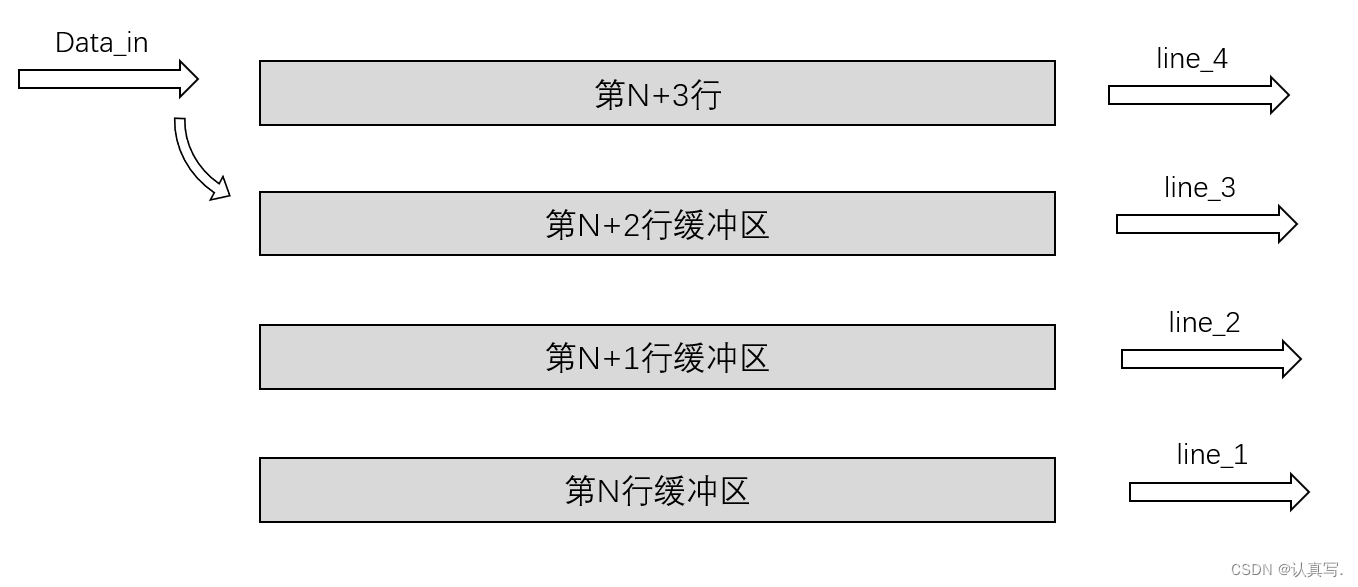
Vivado中通过调用IP核叫RAM-base Shift Register即可实现5行数据移位寄存。因为使用的是720p图像做处理,这里使用IP核串行处理来实现1280个数据(IP核内depth最大为1088)。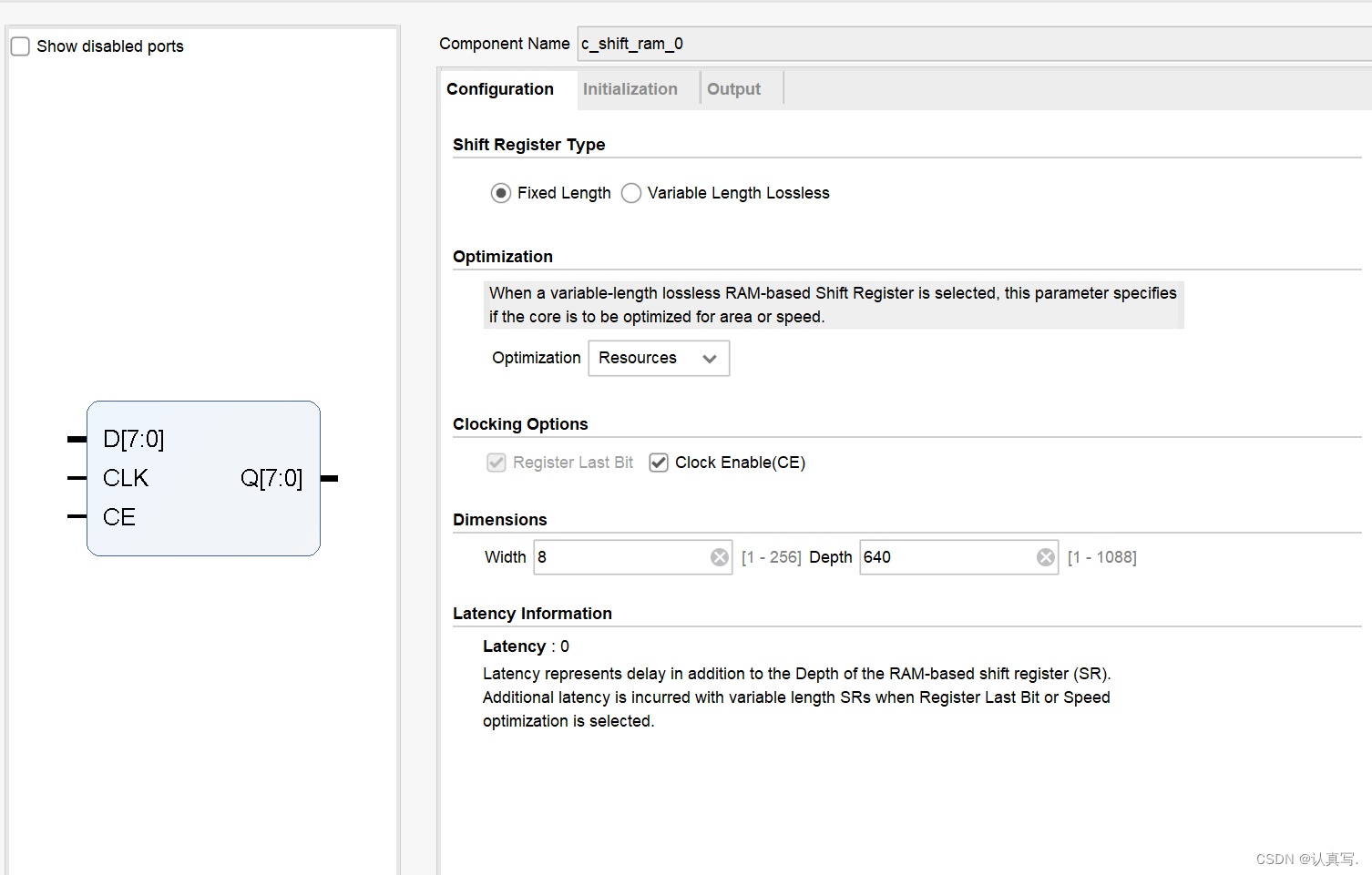
代码如下:
module shift_reg_5x5(
input wire taps_clk ,
input wire[7:0] shift_in ,
input wire shiftin_valid ,
output wire[7:0] shift_out ,
output wire [7:0] taps3x ,
output wire [7:0] taps2x ,
output wire [7:0] taps1x ,
output wire [7:0] taps0x
);
wire [7:0] line3;
wire [7:0] line2;
wire [7:0] line1;
wire [7:0] line0;
//5x1
//5x2
c_shift_ram_0 c_shift_ram_0_u1 (
.D(shift_in), // input wire [7 : 0] D
.CLK(taps_clk), // input wire CLK
.CE(shiftin_valid), // input wire CE
.Q(line3) // output wire [7 : 0] Q
);
c_shift_ram_0 c_shift_ram_0_u2 (
.D(line3), // input wire [7 : 0] D
.CLK(taps_clk), // input wire CLK
.CE(shiftin_valid), // input wire CE
.Q(taps3x) // output wire [7 : 0] Q
);
//5x3
c_shift_ram_0 c_shift_ram_0_u3 (
.D(taps3x), // input wire [7 : 0] D
.CLK(taps_clk), // input wire CLK
.CE(shiftin_valid), // input wire CE
.Q(line2) // output wire [7 : 0] Q
);
c_shift_ram_0 c_shift_ram_0_u4 (
.D(line2), // input wire [7 : 0] D
.CLK(taps_clk), // input wire CLK
.CE(shiftin_valid), // input wire CE
.Q(taps2x) // output wire [7 : 0] Q
);
//5x4
c_shift_ram_0 c_shift_ram_0_u5 (
.D(taps2x), // input wire [7 : 0] D
.CLK(taps_clk), // input wire CLK
.CE(shiftin_valid), // input wire CE
.Q(line1) // output wire [7 : 0] Q
);
c_shift_ram_0 c_shift_ram_0_u6 (
.D(line1), // input wire [7 : 0] D
.CLK(taps_clk), // input wire CLK
.CE(shiftin_valid), // input wire CE
.Q(taps1x) // output wire [7 : 0] Q
);
//5x5
c_shift_ram_0 c_shift_ram_0_u7 (
.D(taps1x), // input wire [7 : 0] D
.CLK(taps_clk), // input wire CLK
.CE(shiftin_valid), // input wire CE
.Q(line0) // output wire [7 : 0] Q
);
c_shift_ram_0 c_shift_ram_0_u8 (
.D(line0), // input wire [7 : 0] D
.CLK(taps_clk), // input wire CLK
.CE(shiftin_valid), // input wire CE
.Q(taps0x) // output wire [7 : 0] Q
);
assign shift_out = taps0x ;
endmodule
仿真如下,5x5窗口生成输出正确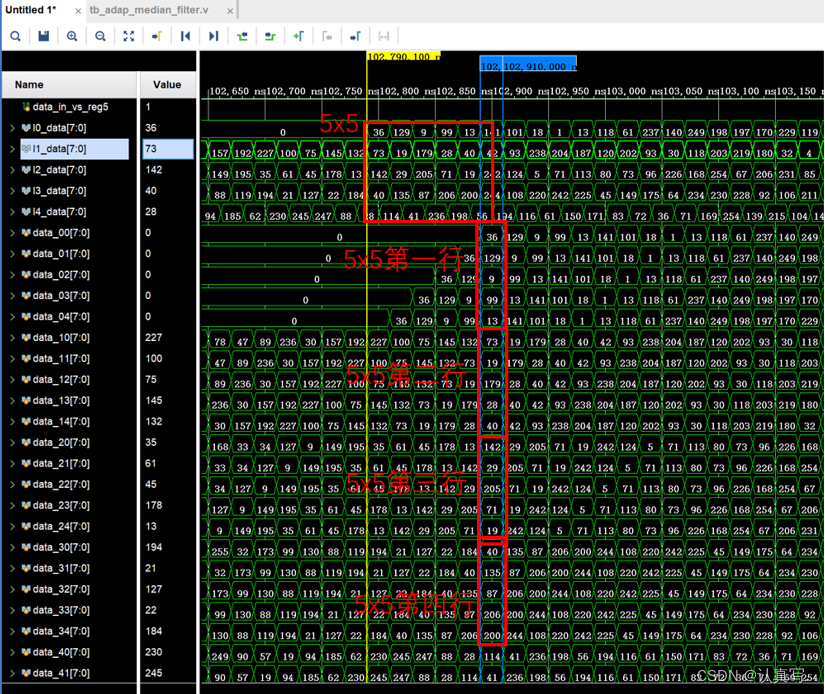
3. 5x5中值滤波器实现
5x5中值输出流程如下,对某一个 5x5 的图像采样窗口,5x5中值滤波器经过两个时钟周期即可实现最大值,最小值的求取,而中值需要再经过两次对角线元素的排序才能输出,也即还需要两个时钟周期才能求取,因此实现完整的滤波器功能需要4个时钟周期。在每个步骤的排序中,每行的排序是可以并行执行的,所以完成5行降幂排序只需要一个时钟周期;每列的排序也是可以并行执行的,所以完成5列降幂排序也只需要一个时钟周期;后面的对角线排序也是一个同步时钟周期即可完成。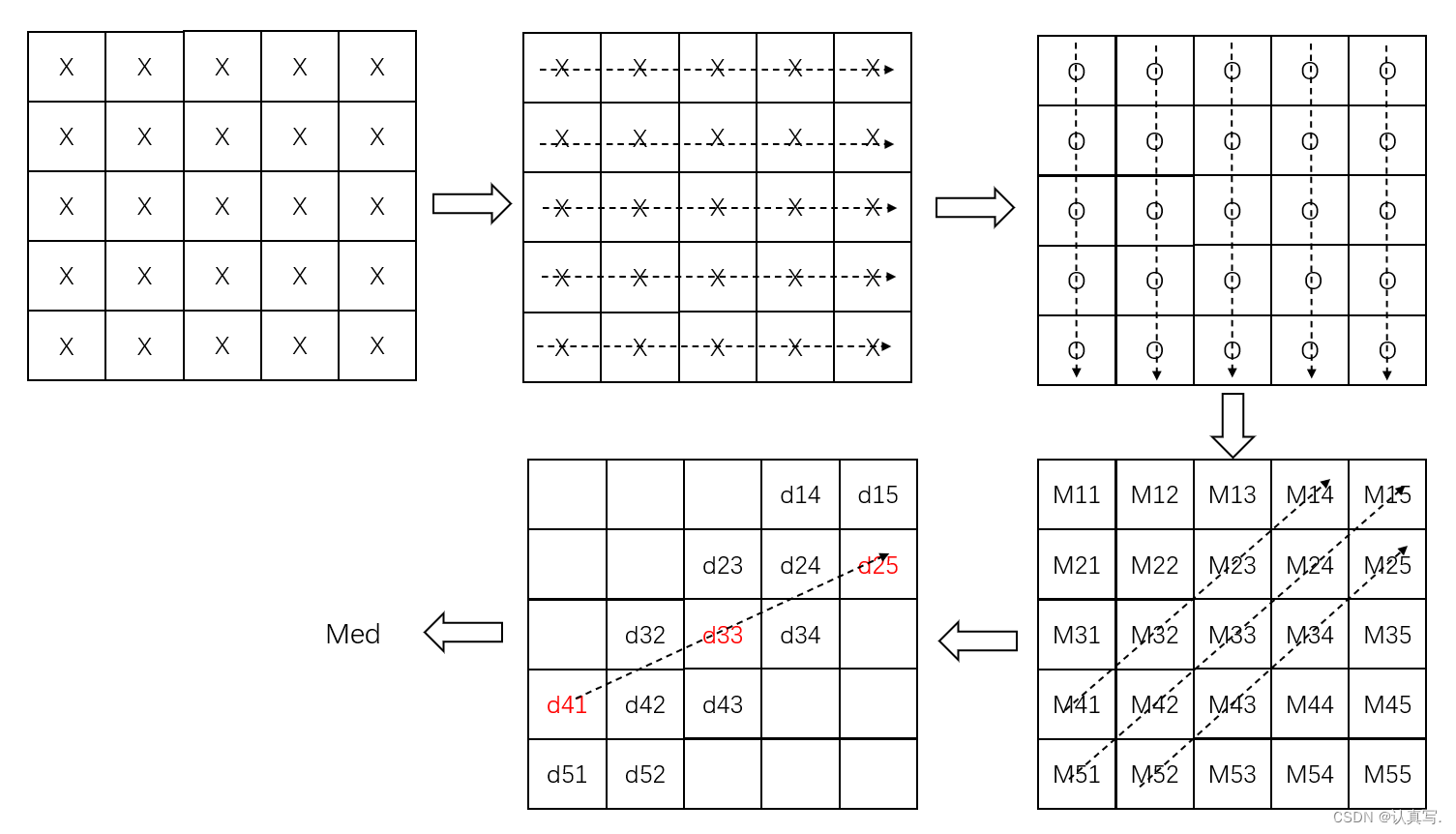
5x5中值滤波器顶层模块代码如下:
module median_filter_5
#(
parameter DATA_WIDTH = 8
)
(
input wire clk ,
input wire reset_p ,
input wire[DATA_WIDTH-1:0]
data_00,data_01,data_02,data_03,data_04,
data_10,data_11,data_12,data_13,data_14,
data_20,data_21,data_22,data_23,data_24,
data_30,data_31,data_32,data_33,data_34,
data_40,data_41,data_42,data_43,data_44,
input wire data_in_valid ,
output wire[DATA_WIDTH-1:0] data_out_max,
output wire[DATA_WIDTH-1:0] data_out_med,
output wire[DATA_WIDTH-1:0] data_out_min,
output wire[DATA_WIDTH-1:0] dout5_xy,//中心像素点
output wire data_out_valid
);
//=======line data Interface ========
wire [DATA_WIDTH-1:0] l0_min,l1_min,l2_min,l3_min,l4_min;
wire [DATA_WIDTH-1:0] l0_min_next,l1_min_next,l2_min_next,l3_min_next,l4_min_next;
wire [DATA_WIDTH-1:0] l0_med,l1_med,l2_med,l3_med,l4_med;
wire [DATA_WIDTH-1:0] l0_max_next,l1_max_next,l2_max_next,l3_max_next,l4_max_next;
wire [DATA_WIDTH-1:0] l0_max,l1_max,l2_max,l3_max,l4_max;
//=======row data Interface ========
wire [DATA_WIDTH-1:0] min_min,min_next_min,med_min,max_next_min,max_min;
wire [DATA_WIDTH-1:0] min_min_next,min_next_min_next,med_min_next,max_next_min_next,max_min_next;
wire [DATA_WIDTH-1:0] min_med,min_next_med,med_med,max_next_med,max_med;
wire [DATA_WIDTH-1:0] valid_med;
wire [DATA_WIDTH-1:0] min_max_next,min_next_max_next,med_max_next,max_next_max_next,max_max_next;
wire [DATA_WIDTH-1:0] min_max,min_next_max,med_max,max_next_max,max_max;
//5x5模版排序需要四个时钟周期
reg data_in_valid_reg1 ;
reg data_in_valid_reg2 ;
reg data_in_valid_reg3 ;
reg data_in_valid_reg4 ;
reg [DATA_WIDTH-1:0] dout5_xy_reg1 ;
reg [DATA_WIDTH-1:0] dout5_xy_reg2 ;
reg [DATA_WIDTH-1:0] dout5_xy_reg3 ;
reg [DATA_WIDTH-1:0] dout5_xy_reg4 ;
always @(posedge clk ) begin
data_in_valid_reg1<= data_in_valid ;
data_in_valid_reg2<= data_in_valid_reg1 ;
data_in_valid_reg3<= data_in_valid_reg2 ;//
data_in_valid_reg4<= data_in_valid_reg3 ;
dout5_xy_reg1 <= data_22 ;
dout5_xy_reg2 <= dout5_xy_reg1 ;
dout5_xy_reg3 <= dout5_xy_reg2 ;
dout5_xy_reg4 <= dout5_xy_reg3 ;
end
//======= l0 排序 ========
sort5 sort5_u0(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg1),
.i1 (data_00),
.i2 (data_01),
.i3 (data_02),
.i4 (data_03),
.i5 (data_04),
.dout_1 (l0_min ),
.dout_2 (l0_min_next ), //临近min的值
.dout_3 (l0_med ),
.dout_4 (l0_max_next ), //临近max的值
.dout_5 (l0_max ),
.dout_valid ()
);
//======= l1 排序 ========
sort5 sort5_u1(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg1),
.i1 (data_10),
.i2 (data_11),
.i3 (data_12),
.i4 (data_13),
.i5 (data_14),
.dout_1 (l1_min ),
.dout_2 (l1_min_next ), //临近min的值
.dout_3 (l1_med ),
.dout_4 (l1_max_next ), //临近max的值
.dout_5 (l1_max ),
.dout_valid ()
);
//======= l2 排序 ========
sort5 sort5_u2(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg1),
.i1 (data_20),
.i2 (data_21),
.i3 (data_22),
.i4 (data_23),
.i5 (data_24),
.dout_1 (l2_min ),
.dout_2 (l2_min_next ), //临近min的值
.dout_3 (l2_med ),
.dout_4 (l2_max_next ), //临近max的值
.dout_5 (l2_max ),
.dout_valid ()
);
//======= l3 排序 ========
sort5 sort5_u3(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg1),
.i1 (data_30),
.i2 (data_31),
.i3 (data_32),
.i4 (data_33),
.i5 (data_34),
.dout_1 (l3_min ),
.dout_2 (l3_min_next ), //临近min的值
.dout_3 (l3_med ),
.dout_4 (l3_max_next ), //临近max的值
.dout_5 (l3_max ),
.dout_valid ()
);
//======= l4 排序 ========
sort5 sort5_u4(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg1),
.i1 (data_40),
.i2 (data_41),
.i3 (data_42),
.i4 (data_43),
.i5 (data_44),
.dout_1 (l4_min ),
.dout_2 (l4_min_next ), //临近min的值
.dout_3 (l4_med ),
.dout_4 (l4_max_next ), //临近max的值
.dout_5 (l4_max ),
.dout_valid ()
);
//======= row0 排序 ========
sort5 sort5_u5(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg2),
.i1 (l0_min),
.i2 (l1_min),
.i3 (l2_min),
.i4 (l3_min),
.i5 (l4_min),
.dout_1 (min_min ),
.dout_2 (min_min_next ), //临近min的值
.dout_3 (min_med ),
.dout_4 (min_max_next ), //临近max的值
.dout_5 (min_max ),
.dout_valid ()
);
//======= row1 排序 ========
sort5 sort5_u6(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg2),
.i1 (l0_min_next),
.i2 (l1_min_next),
.i3 (l2_min_next),
.i4 (l3_min_next),
.i5 (l4_min_next),
.dout_1 (min_next_min ),
.dout_2 (min_next_min_next), //临近min的值
.dout_3 (min_next_med ),
.dout_4 (min_next_max_next), //临近max的值
.dout_5 (min_next_max ),
.dout_valid ()
);
//======= row2 排序 ========
sort5 sort5_u7(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg2),
.i1 (l0_med),
.i2 (l1_med),
.i3 (l2_med),
.i4 (l3_med),
.i5 (l4_med),
.dout_1 (med_min ),
.dout_2 (med_min_next), //临近min的值
.dout_3 (med_med ),
.dout_4 (med_max_next), //临近max的值
.dout_5 (med_max ),
.dout_valid ()
);
//======= row3 排序 ========
sort5 sort5_u8(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg2),
.i1 (l0_max_next),
.i2 (l1_max_next),
.i3 (l2_max_next),
.i4 (l3_max_next),
.i5 (l4_max_next),
.dout_1 (max_next_min ),
.dout_2 (max_next_min_next), //临近min的值
.dout_3 (max_next_med ),
.dout_4 (max_next_max_next), //临近max的值
.dout_5 (max_next_max ),
.dout_valid ()
);
//======= row4 排序 ========
sort5 sort5_u9(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg2),
.i1 (l0_max),
.i2 (l1_max),
.i3 (l2_max),
.i4 (l3_max),
.i5 (l4_max),
.dout_1 (max_min ),
.dout_2 (max_min_next), //临近min的值
.dout_3 (max_med ),
.dout_4 (max_max_next), //临近max的值
.dout_5 (max_max ),
.dout_valid ()
);
//
wire [DATA_WIDTH-1:0] d14,d23,d32,d41;
wire [DATA_WIDTH-1:0] d15,d24,d33,d42,d51;
wire [DATA_WIDTH-1:0] d25,d34,d43,d52;
sort5 sort5_u10(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg3),
.i1 (0),
.i2 (min_max_next),
.i3 (min_next_med),
.i4 (med_min_next),
.i5 (max_next_min),
.dout_1 ( ),
.dout_2 (d14), //临近min的值
.dout_3 (d23),
.dout_4 (d32), //临近max的值
.dout_5 (d41),
.dout_valid ()
);
sort5 sort5_u11(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg3),
.i1 (min_max ),
.i2 (min_next_max_next),
.i3 (med_med ),
.i4 (max_next_min_next),
.i5 (max_min ),
.dout_1 (d15),
.dout_2 (d24), //临近min的值
.dout_3 (d33),
.dout_4 (d42), //临近max的值
.dout_5 (d51),
.dout_valid ()
);
sort5 sort5_u12(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg3),
.i1 (0 ),
.i2 (min_next_max),
.i3 (med_max_next),
.i4 (max_next_med),
.i5 (max_min_next),
.dout_1 (),
.dout_2 (d25), //临近min的值
.dout_3 (d34),
.dout_4 (d43), //临近max的值
.dout_5 (d52),
.dout_valid ()
);
sort5 sort5_u13(
.clk (clk),
.reset_p (reset_p),
.din_valid (data_in_valid_reg4),
.i1 (0),
.i2 (0),
.i3 (d41),
.i4 (d33),
.i5 (d25),
.dout_1 (),
.dout_2 (), //临近min的值
.dout_3 (),
.dout_4 (valid_med), //临近max的值
.dout_5 (),
.dout_valid ()
);
//输出数据同步
reg [7:0] min_min_reg1,min_min_reg2;
reg [7:0] max_max_reg1,max_max_reg2;
always @(posedge clk ) begin
min_min_reg1<=min_min;
min_min_reg2<=min_min_reg1;
max_max_reg1<=max_max;
max_max_reg2<=max_max_reg1;
end
assign data_out_min = min_min_reg2 ;
assign data_out_med = valid_med ;
assign data_out_max = max_max_reg2 ;
assign dout5_xy = dout5_xy_reg4;
assign data_out_valid =data_in_valid_reg4;
endmodule
4. 自适应判断模块实现
注意3x3中值滤波器只需三个时钟周期即可输出中值,两个中值滤波器输入数据来自同一个 5x5 的图像采样窗口,是同步的,而处理速度不同,因此输出数据将不再同步,会影响到后面的自适应比较模块,需要对3x3中值滤波器输出数据做延迟处理。
自适应中值滤波顶层代码:
module adap_median_filter#(
parameter DATA_WIDTH = 8
)(
input wire clk ,
input wire reset_p ,
input wire [DATA_WIDTH-1:0] data_in ,
input wire data_in_valid ,
input wire data_in_hs ,
input wire data_in_vs ,
output reg [DATA_WIDTH-1:0] data_out,
output wire data_out_valid ,
output wire data_out_hs ,
output wire data_out_vs
);
//将3x3滤波器输出数据与5x5滤波器同步输出到自适应判断模块
wire [DATA_WIDTH-1:0] S3_max,S3_med,S3_min;
//S内部最大值、中值、最小值、中心点值
wire [DATA_WIDTH-1:0] S5_max,S5_med,S5_min;
// reg [2:0] S ; //窗口尺寸
wire [DATA_WIDTH-1:0] dout5_xy;
reg data_in_valid_reg1,data_in_valid_reg2,data_in_valid_reg3,
data_in_valid_reg4,data_in_valid_reg5;
reg data_in_hs_reg1,data_in_hs_reg2,data_in_hs_reg3,
data_in_hs_reg4,data_in_hs_reg5;
reg data_in_vs_reg1,data_in_vs_reg2,data_in_vs_reg3,
data_in_vs_reg4,data_in_vs_reg5;
always@(posedge clk)
begin
data_in_valid_reg1 <= data_in_valid;
data_in_valid_reg2 <= data_in_valid_reg1;
data_in_valid_reg3 <= data_in_valid_reg2;
data_in_valid_reg4 <= data_in_valid_reg3;
data_in_valid_reg5 <= data_in_valid_reg4;
data_in_hs_reg1 <= data_in_hs;
data_in_hs_reg2 <= data_in_hs_reg1;
data_in_hs_reg3 <= data_in_hs_reg2;
data_in_hs_reg4 <= data_in_hs_reg3;
data_in_hs_reg5 <= data_in_hs_reg4;
data_in_vs_reg1 <= data_in_vs;
data_in_vs_reg2 <= data_in_vs_reg1;
data_in_vs_reg3 <= data_in_vs_reg2;
data_in_vs_reg4 <= data_in_vs_reg3;
data_in_vs_reg5 <= data_in_vs_reg4;
end
//======= 5x5 generate begin ========
wire [DATA_WIDTH-1:0] l0_data; //第一行数据
wire [DATA_WIDTH-1:0] l1_data;
wire [DATA_WIDTH-1:0] l2_data;
wire [DATA_WIDTH-1:0] l3_data;
wire [DATA_WIDTH-1:0] l4_data;
shift_reg_5x5 shift_reg_5x5_u(
.taps_clk (clk ),
.shift_in (data_in ),
.shiftin_valid(data_in_valid),
.shift_out ( ),
.taps3x (l3_data ),
.taps2x (l2_data ),
.taps1x (l1_data ),
.taps0x (l0_data )
);
assign l4_data = data_in;
//5x5 row 1
reg [DATA_WIDTH-1:0] data_00,data_01,data_02,data_03,data_04;
reg [DATA_WIDTH-1:0] data_10,data_11,data_12,data_13,data_14;
reg [DATA_WIDTH-1:0] data_20,data_21,data_22,data_23,data_24;
reg [DATA_WIDTH-1:0] data_30,data_31,data_32,data_33,data_34;
reg [DATA_WIDTH-1:0] data_40,data_41,data_42,data_43,data_44;
always@(posedge clk or posedge reset_p)
begin
if(reset_p)begin
data_00 <= 8'd0;data_01 <= 8'd0;data_02 <= 8'd0;data_03 <= 8'd0;data_04 <= 8'd0;
data_10 <= 8'd0;data_11 <= 8'd0;data_12 <= 8'd0;data_13 <= 8'd0;data_14 <= 8'd0;
data_20 <= 8'd0;data_21 <= 8'd0;data_22 <= 8'd0;data_23 <= 8'd0;data_24 <= 8'd0;
data_30 <= 8'd0;data_31 <= 8'd0;data_32 <= 8'd0;data_33 <= 8'd0;data_34 <= 8'd0;
data_40 <= 8'd0;data_41 <= 8'd0;data_42 <= 8'd0;data_43 <= 8'd0;data_44 <= 8'd0;
end
else if (data_in_hs && data_in_vs) begin
if (data_in_valid) begin
data_04 <= l0_data; data_03 <= data_04; data_02 <= data_03; data_01 <= data_02; data_00 <= data_01;
data_14 <= l1_data; data_13 <= data_14; data_12 <= data_13; data_11 <= data_12; data_10 <= data_11;
data_24 <= l2_data; data_23 <= data_24; data_22 <= data_23; data_21 <= data_22; data_20 <= data_21;
data_34 <= l3_data; data_33 <= data_34; data_32 <= data_33; data_31 <= data_32; data_30 <= data_31;
data_44 <= l4_data; data_43 <= data_44; data_42 <= data_43; data_41 <= data_42; data_40 <= data_41;
end
else begin
data_00 <= data_00; data_01 <= data_01; data_02 <= data_02; data_03 <= data_03; data_04 <= data_04;
data_10 <= data_10; data_11 <= data_11; data_12 <= data_12; data_13 <= data_13; data_14 <= data_14;
data_20 <= data_20; data_21 <= data_21; data_22 <= data_22; data_23 <= data_23; data_24 <= data_24;
data_30 <= data_30; data_31 <= data_31; data_32 <= data_32; data_33 <= data_33; data_34 <= data_34;
data_40 <= data_40; data_41 <= data_41; data_42 <= data_42; data_43 <= data_43; data_44 <= data_44;
end
end
else begin
data_00 <= 8'd0;data_01 <= 8'd0;data_02 <= 8'd0;data_03 <= 8'd0;data_04 <= 8'd0;
data_10 <= 8'd0;data_11 <= 8'd0;data_12 <= 8'd0;data_13 <= 8'd0;data_14 <= 8'd0;
data_20 <= 8'd0;data_21 <= 8'd0;data_22 <= 8'd0;data_23 <= 8'd0;data_24 <= 8'd0;
data_30 <= 8'd0;data_31 <= 8'd0;data_32 <= 8'd0;data_33 <= 8'd0;data_34 <= 8'd0;
data_40 <= 8'd0;data_41 <= 8'd0;data_42 <= 8'd0;data_43 <= 8'd0;data_44 <= 8'd0;
end
end
//======= 5x5 generate end ========
median_filter_3#(
.DATA_WIDTH (8)
)
median_filter_3_u(
.clk (clk ) ,
.reset_p(reset_p) ,
.data_00(data_11),.data_01(data_12),.data_02(data_13),
.data_10(data_21),.data_11(data_22),.data_12(data_23),
.data_20(data_31),.data_21(data_32),.data_22(data_33),
.data_in_valid (data_in_valid),
.data_out_min (S3_min),
.data_out_med (S3_med),
.data_out_max (S3_max),
.data_out_valid ( )
);
median_filter_5#(
.DATA_WIDTH (8)
)
median_filter_5_u(
.clk (clk) ,
.reset_p (reset_p) ,
.data_00(data_00),.data_01(data_01),.data_02(data_02),.data_03(data_03),.data_04(data_04),
.data_10(data_10),.data_11(data_11),.data_12(data_12),.data_13(data_13),.data_14(data_14),
.data_20(data_20),.data_21(data_21),.data_22(data_22),.data_23(data_23),.data_24(data_24),
.data_30(data_30),.data_31(data_31),.data_32(data_32),.data_33(data_33),.data_34(data_34),
.data_40(data_40),.data_41(data_41),.data_42(data_42),.data_43(data_43),.data_44(data_44),
.data_in_valid (data_in_valid) ,
.data_out_max (S5_max ) ,
.data_out_med (S5_med ) ,
.data_out_min (S5_min ) ,
.dout5_xy (dout5_xy ) ,//中心像素点
.data_out_valid ( )
);
//======= adaptive logical begin ========
always@(posedge clk or posedge reset_p)
begin
if(reset_p)begin
data_out<=8'd0;
end
else if(data_in_valid)begin
if((S5_med==S5_max)||(S5_med==S5_min)) begin
if ((S3_med==S3_max)||(S3_med==S3_min)) begin
data_out<=S5_med;
end
else begin
if ((dout5_xy==S3_max)||(dout5_xy==S3_min)) begin
data_out<=S3_med;
end
else
data_out<=dout5_xy;
end
end
else begin
if ((dout5_xy==S5_max)||(dout5_xy==S5_min)) begin
data_out <= S5_med;
end
else
data_out<= dout5_xy;
end
end
end
assign data_out_valid = data_in_valid_reg4;
assign data_out_hs = data_in_hs_reg4;
assign data_out_vs = data_in_vs_reg4;
endmodule
仿真结果如下,滤波器输出数据进行了同步,并进行自适应判断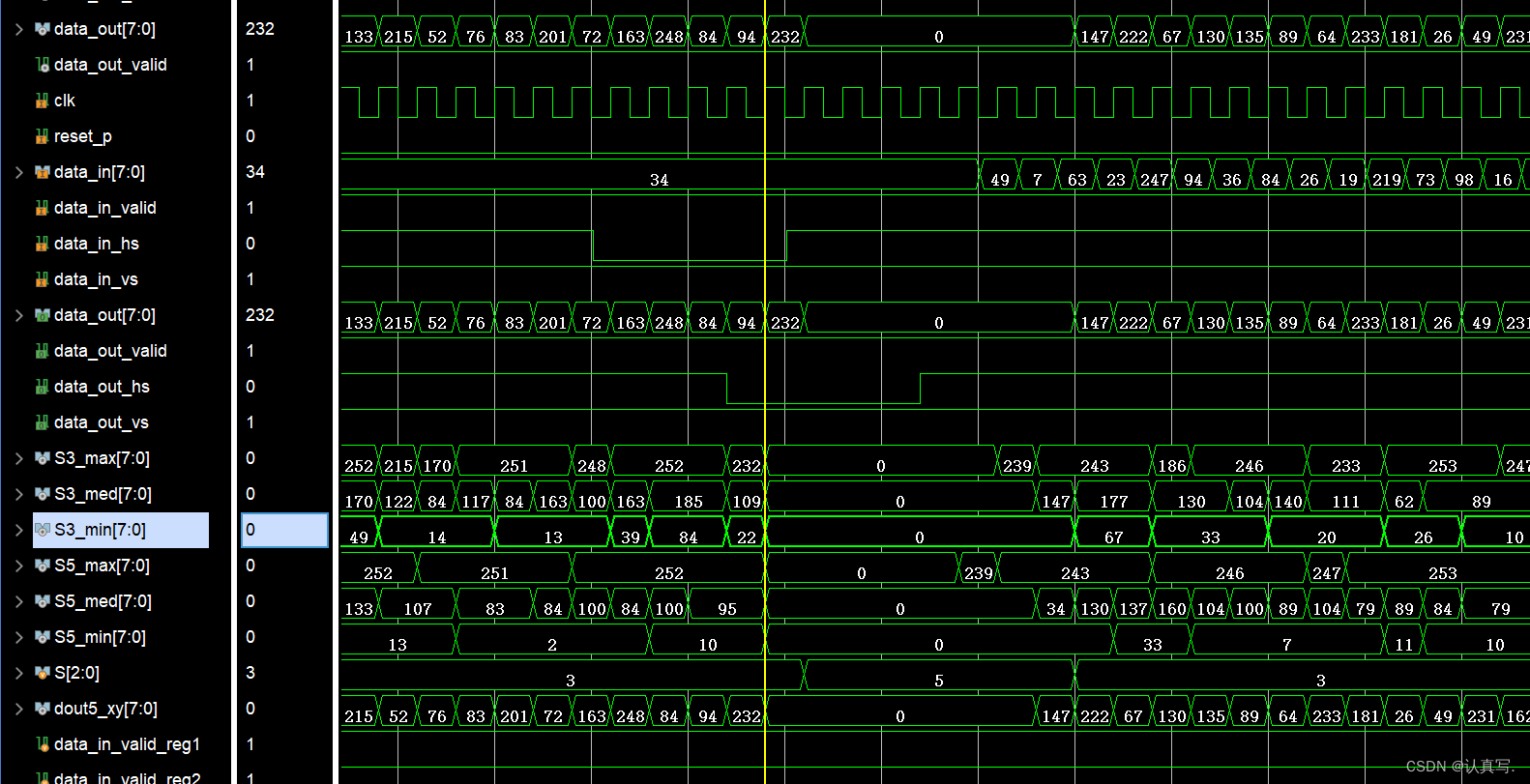 文章来源:https://uudwc.com/A/GdEg0
文章来源:https://uudwc.com/A/GdEg0
5. 处理效果
如下图,1图为含有10%浓度椒盐噪声的灰度图,2图为含有30%浓度椒盐噪声的灰度图,3图含有50%浓度椒盐噪声的灰度图,4图为原始灰度图。
3x3中值滤波器处理效果图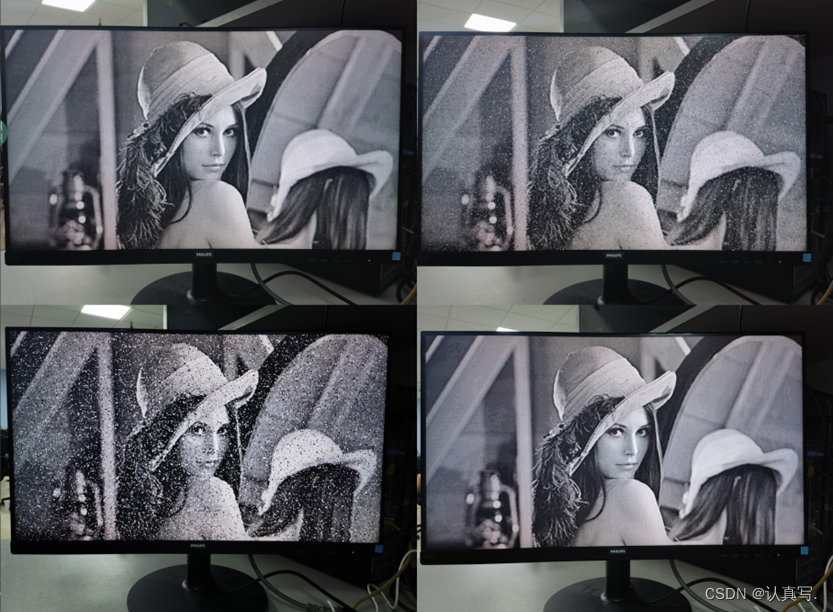
5x5中值滤波器处理效果图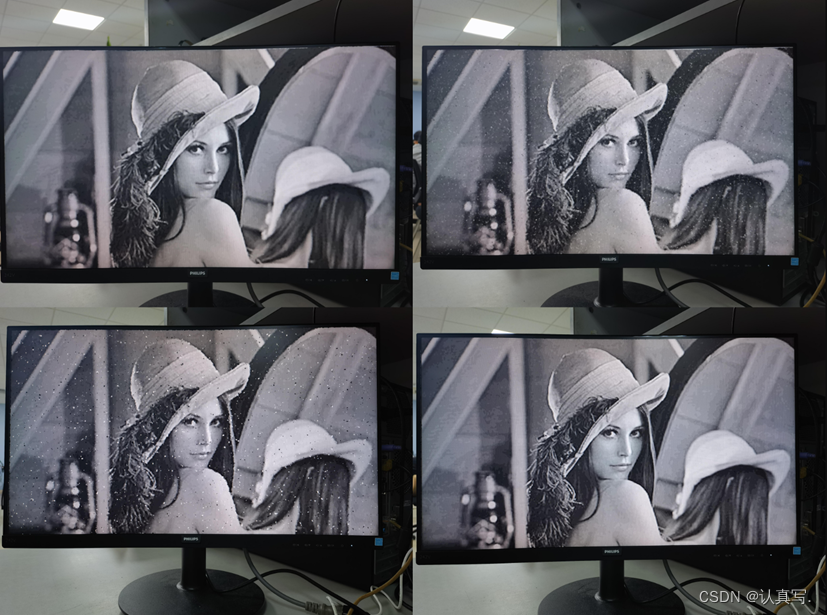
自适应中值滤波处理
以上仅供参考(作为学习记录)文章来源地址https://uudwc.com/A/GdEg0