文章目录
- 0 引言
- 1 数据预处理
- 1.1 EuRoc数据
- 1.2 TUM数据
- 1.3 KITTI数据
- 2 代码修改
- 2.1 单目
- 2.2 双目
- 2.3 RGB-D
- 3 运行ROS版ORB-SLAM2
- 3.1 单目
- 3.2 双目
- 3.3 RGB-D
- ORB-SLAM2学习笔记系列:
0 引言
ORB-SLAM2学习笔记1已成功编译安装ROS版本ORB-SLAM2到本地,本篇目的是用EuRoc、TUM、KITTI开源数据来运行ROS版ORB-SLAM2,并生成轨迹。
1 数据预处理
1.1 EuRoc数据
? EuRoc开源数据已经支持rosbag的数据包下载,如下图,直接点击对应的link下载即可,本文以Machine Hall 01为例: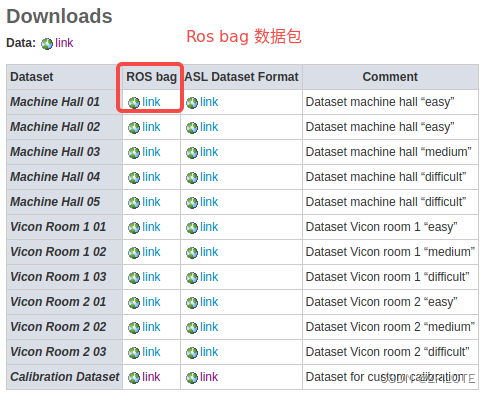
下载的Machine Hall 01数据包,用rosbag info MH_01_easy.bag 命令查看:
path: MH_01_easy.bag
version: 2.0
duration: 3:06s (186s)
start: Jun 25 2014 03:02:59.81 (1403636579.81)
end: Jun 25 2014 03:06:06.70 (1403636766.70)
size: 2.5 GB
messages: 47283
compression: none [2456/2456 chunks]
types: geometry_msgs/PointStamped [c63aecb41bfdfd6b7e1fac37c7cbe7bf]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
topics: /cam0/image_raw 3682 msgs : sensor_msgs/Image
/cam1/image_raw 3682 msgs : sensor_msgs/Image
/imu0 36820 msgs : sensor_msgs/Imu
/leica/position 3099 msgs : geometry_msgs/PointStamped
1.2 TUM数据
? TUM开源数据已经支持rosbag的数据包下载,如下图,直接点击对应的ROS bag下载即可,本文以freiburg1_desk为例: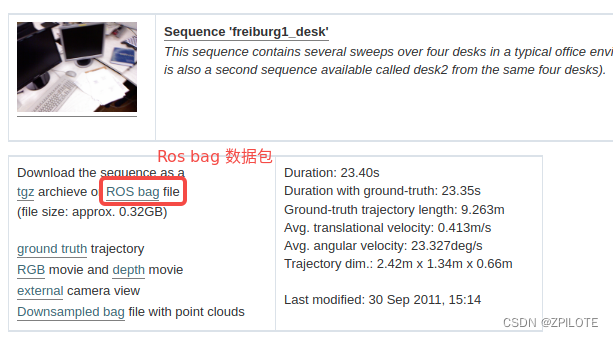
下载的freiburg1_desk数据包,用rosbag info rgbd_dataset_freiburg1_desk.bag 命令查看:
path: rgbd_dataset_freiburg1_desk.bag
version: 2.0
duration: 23.8s
start: May 10 2011 20:44:09.56 (1305031449.56)
end: May 10 2011 20:44:33.32 (1305031473.32)
size: 371.7 MB
messages: 19893
compression: bz2 [1210/1210 chunks; 29.85%]
uncompressed: 1.2 GB @ 52.3 MB/s
compressed: 370.9 MB @ 15.6 MB/s (29.85%)
types: sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
tf/tfMessage [94810edda583a504dfda3829e70d7eec]
visualization_msgs/MarkerArray [f10fe193d6fac1bf68fad5d31da421a7]
topics: /camera/depth/camera_info 595 msgs : sensor_msgs/CameraInfo
/camera/depth/image 595 msgs : sensor_msgs/Image
/camera/rgb/camera_info 613 msgs : sensor_msgs/CameraInfo
/camera/rgb/image_color 613 msgs : sensor_msgs/Image
/cortex_marker_array 2360 msgs : visualization_msgs/MarkerArray
/imu 11815 msgs : sensor_msgs/Imu
/tf 3302 msgs : tf/tfMessage
1.3 KITTI数据
? KITTI开源数据是不支持rosbag的数据包下载,ORB-SLAM2学习笔记4 中已经下载非ROS版的KITTI数据data_odometry_poses,但本文又需要用rosbag的数据包,所以需要转换图片,时间戳等数据信息为rosbag数据包。
? 推荐一个转换脚本:https://gitee.com/zengtaiping/image2rosbag_KITTIodometry
下载转换的脚本:
git clone https://gitee.com/zengtaiping/image2rosbag_KITTIodometry.git
下载后,进入到文件夹中,可发现如下的文件tree:
.
├── img2bag_kitti_MonoBag.py
├── img2bag_kitti_odo.py
├── img2bag_kitti_StereoBag.py # kitti转换成双目rosbag
├── kitti_republish.launch
└── README.md
0 directories, 5 files
然后执行如下命令(PATH为data_odometry_gray存放的路径,KITTI_StereoBag_seq00.bag可自行命名)来转换KITTI数据为rosbag数据,以下为 KITTI data_odometry_poses 中的 00 组数据,转换成双目rosbag为例:(也可用其他脚本转换成单目rosbag等)
python img2bag_kitti_StereoBag.py PATH/data_odometry_gray/dataset/sequences/00 KITTI_StereoBag_seq00.bag PATH/data_odometry_gray/dataset/sequences/00/times.txt
等待片刻,用命令rosbag info KITTI_StereoBag_seq00.bag 查看生成的rosbag包
path: KITTI_StereoBag_seq00.bag
version: 2.0
duration: 7:50s (470s)
start: Jan 01 1970 08:00:00.00 (0.00)
end: Jan 01 1970 08:07:50.58 (470.58)
size: 3.9 GB
messages: 9082
compression: none [4541/4541 chunks]
types: sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
topics: camera/left/image_raw 4541 msgs : sensor_msgs/Image
camera/right/image_raw 4541 msgs : sensor_msgs/Image
2 代码修改
由于ROS版本ORB-SLAM2中的图像topic都写死了,所以主要修改对应的图像topic名字为对应的开源数据图像topic的名字。
切记每次修改或统一修改后,执行./build_ros.sh重新编译。
2.1 单目
打开ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/ros_mono.cc文件,以使用EuRoc数据中的cam0图像topic名字 /cam0/image_raw为例,如下所示,大概在第64行代码处修改即可。
ros::NodeHandle nodeHandler;
// ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1, &ImageGrabber::GrabImage,&igb);
ros::Subscriber sub = nodeHandler.subscribe("/cam0/image_raw", 1, &ImageGrabber::GrabImage,&igb);
2.2 双目
打开ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/ros_stereo.cc文件,以使用EuRoc数据中的cam0图像topic名字 /cam0/image_raw和cam1图像topic名字 /cam1/image_raw为例,如下所示,大概在第112、113行代码处修改即可。
ros::NodeHandle nh;
// message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/camera/left/image_raw", 1);
// message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "camera/right/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/cam0/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "/cam1/image_raw", 1);
2.3 RGB-D
打开ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/ros_rgbd.cc文件,以使用TUM数据中的rgb彩色图像topic名字 /camera/rgb/image_color和depth深度图像topic名字 /camera/depth/image为例,如下所示,大概在第68、69行代码处修改即可。
// message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_raw", 1);
// message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "camera/depth_registered/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_color", 1);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/camera/depth/image", 1);
3 运行ROS版ORB-SLAM2
3.1 单目
以使用EuRoc数据中的cam0图像topic名字 /cam0/image_raw为例,修改代码后,重新执行./build_ros.sh,然后执行以下ROS版本命令:
# 新开终端1
roscore
# 新开终端2 ORB-SLAM2工程目录下执行
rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml
# 新开终端3 MH_01_easy.bag 存放目录下执行
rosbag play MH_01_easy.bag
执行后,两个可视化页面ORB-SLAM2 Current Frame 和 ORB-SLAM2 Map Viewer开始有数据输入,如下图: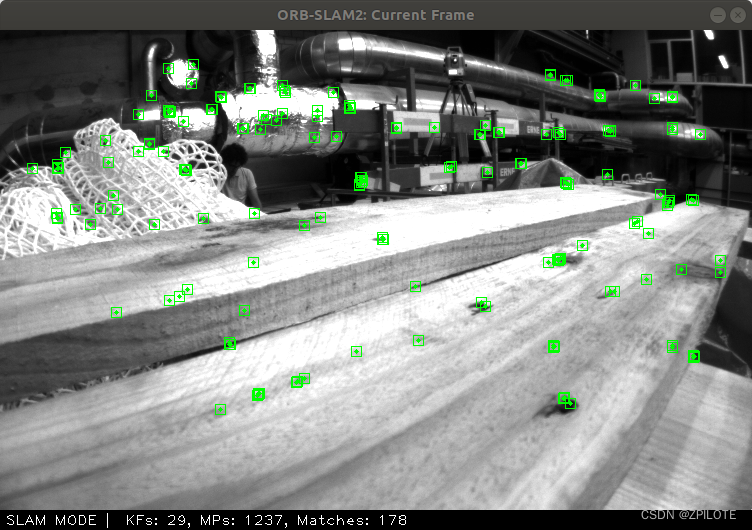
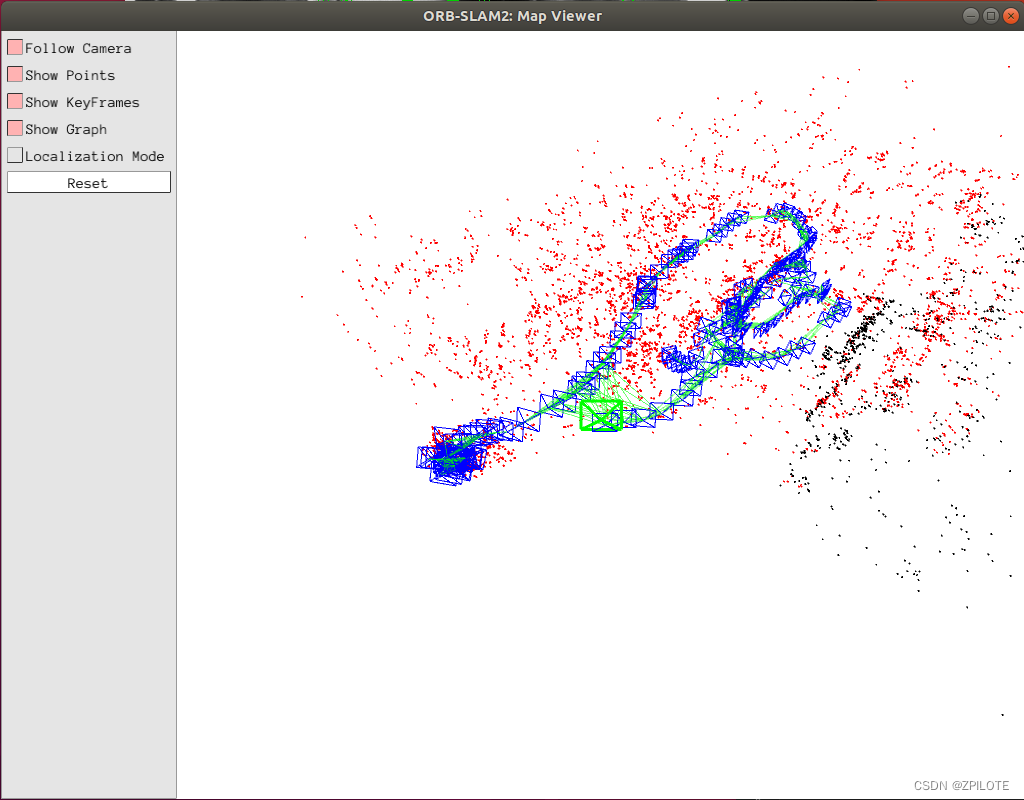
数据回放完毕后,还在该终端目录下保存了轨迹文件KeyFrameTrajectory.txt
3.2 双目
以使用1.3中转换的KITTI rosbag数据为例,左目图像topic名字 camera/left/image_raw和右目图像topic名字 camera/right/image_raw为例,修改代码后,重新执行./build_ros.sh,然后执行以下ROS版本命令:
# 新开终端1
roscore
# 新开终端2 ORB-SLAM2工程目录下执行
rosrun ORB_SLAM2 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/KITTI00-02.yaml false
# 新开终端3 MH_01_easy.bag 存放目录下执行
rosbag play KITTI_StereoBag_seq00.bag
执行后,两个可视化页面ORB-SLAM2 Current Frame 和 ORB-SLAM2 Map Viewer开始有数据输入,如下图: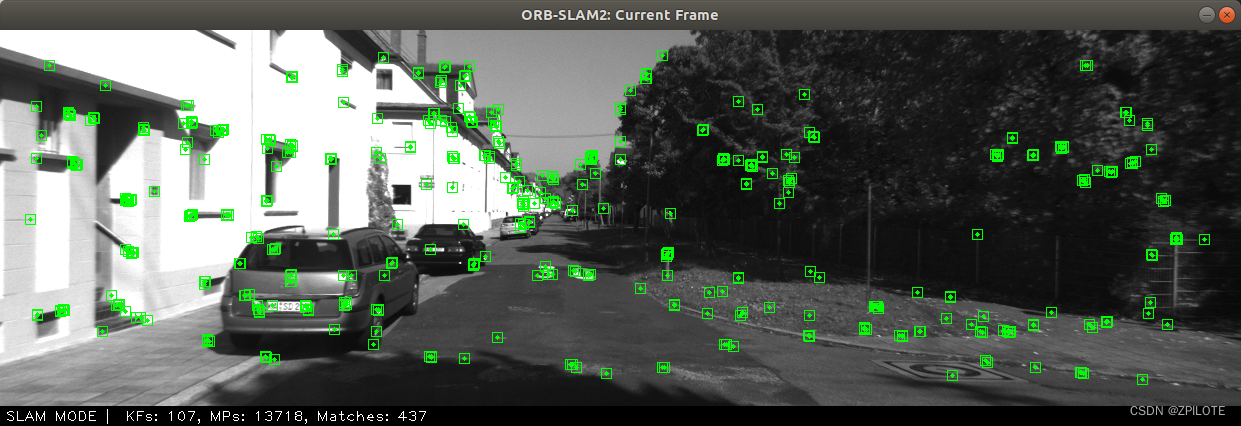
数据回放完毕后,还在该终端目录下保存了三个文件:
Saving keyframe trajectory to KeyFrameTrajectory_TUM_Format.txt ...
trajectory saved!
Saving camera trajectory to FrameTrajectory_TUM_Format.txt ...
trajectory saved!
Saving camera trajectory to FrameTrajectory_KITTI_Format.txt ...
trajectory saved!
3.3 RGB-D
以使用TUM数据中的rgb彩色图像topic名字 /camera/rgb/image_color和depth深度图像topic名字 /camera/depth/image为例,修改代码后,重新执行./build_ros.sh,然后执行以下ROS版本命令:
# 新开终端1
roscore
# 新开终端2 ORB-SLAM2工程目录下执行
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml
# 新开终端3 MH_01_easy.bag 存放目录下执行
rosbag play rgbd_dataset_freiburg1_desk.bag
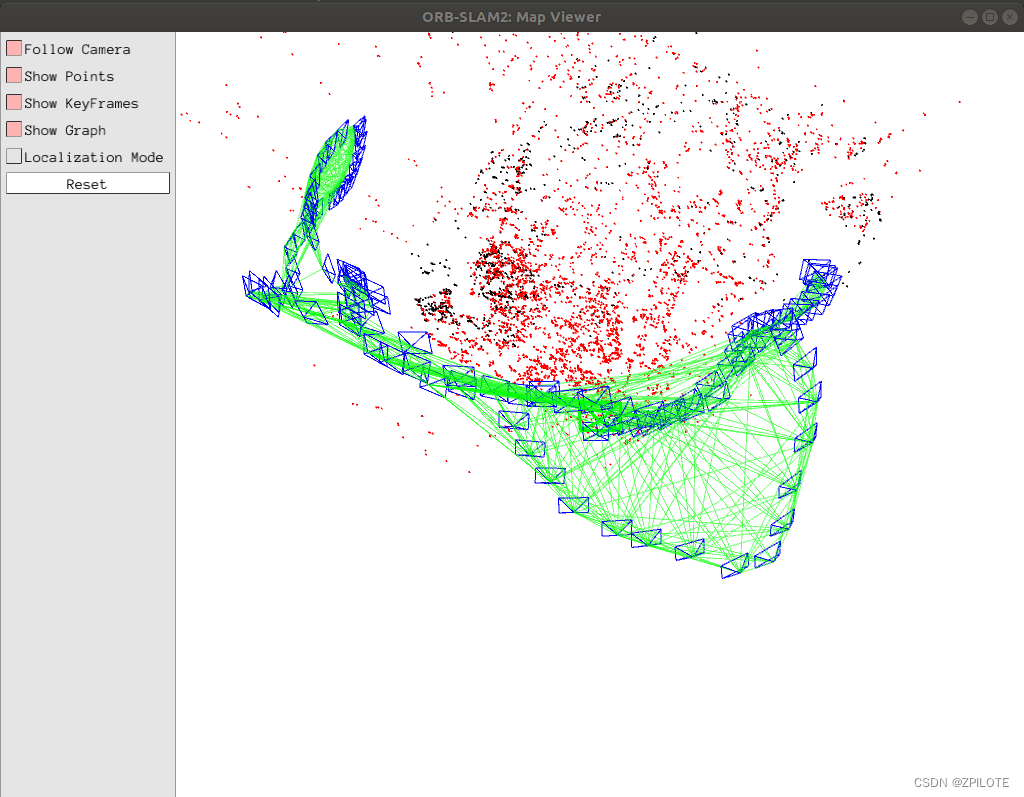
执行后,两个可视化页面ORB-SLAM2 Current Frame 和 ORB-SLAM2 Map Viewer开始有数据输入,如下图,Map Viewer 可视化有问题,轨迹在中心处聚集: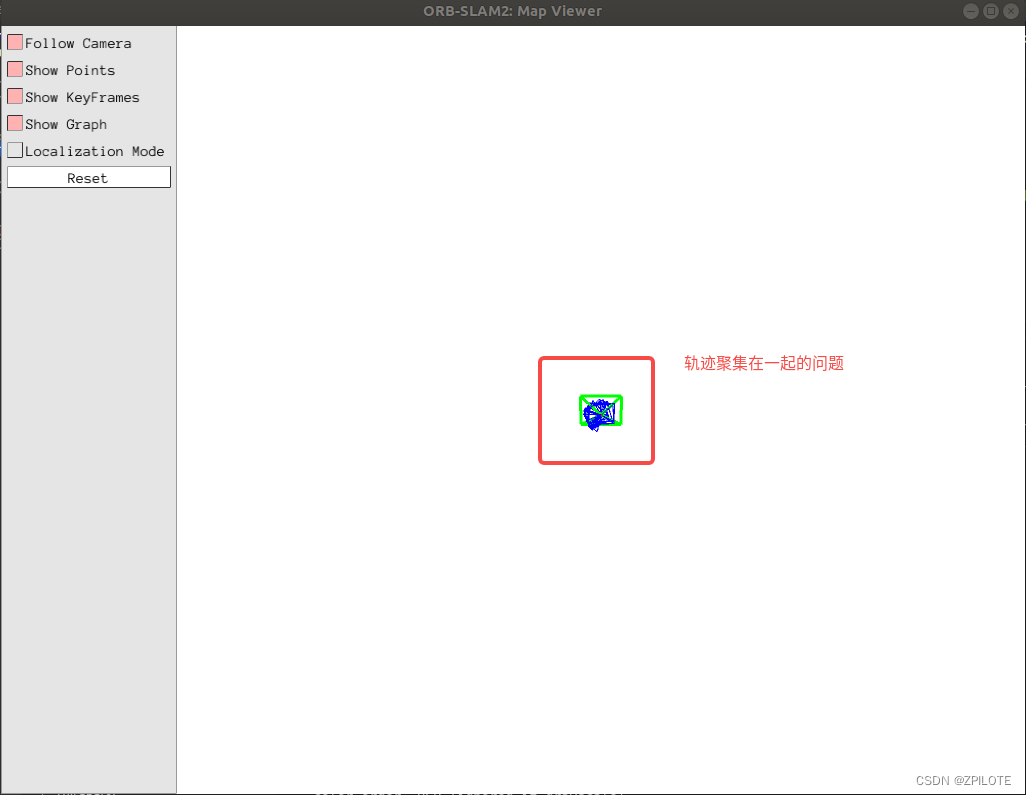
仔细排查后,TUM 官网已经说明,如果用的是16-bit PNG图片数据,factor=5000,但如果用的是 32-bit ROS bag数据,factor=1:
factor = 5000 # for the 16-bit PNG files
# OR: factor = 1 # for the 32-bit float images in the ROS bag files
所以打开对应的Examples/RGB-D/TUM1.yaml文件,修改DepthMapFactor参数为 1.0
# Deptmap values factor
# DepthMapFactor: 5000.0
DepthMapFactor: 1.0
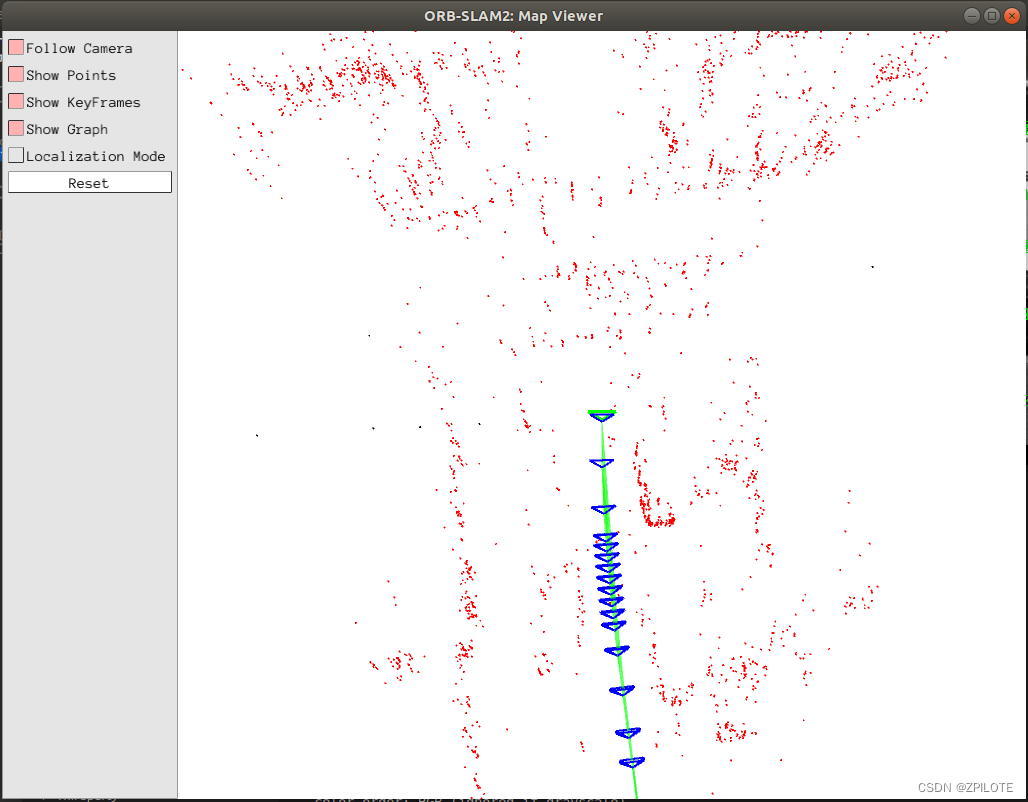
然后重新执行rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml 和 rosbag play rgbd_dataset_freiburg1_desk.bag ,如下图,Map Viewer可视化问题解决: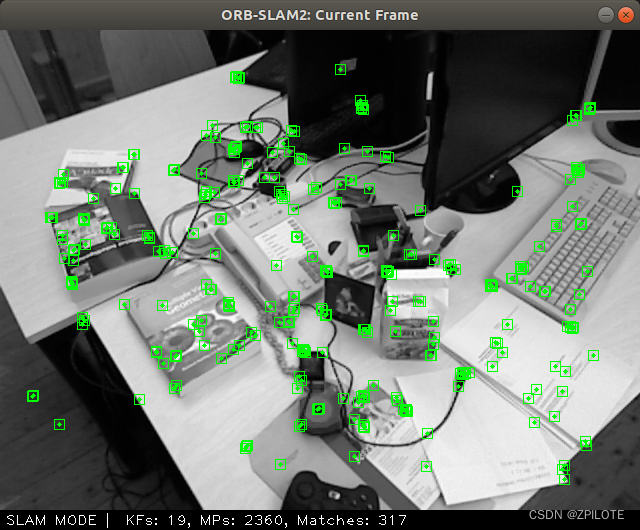
数据回放完毕后,还在该终端目录下保存了轨迹文件KeyFrameTrajectory.txt
至此,成功用EuRoc、TUM、KITTI开源数据来运行ROS版ORB-SLAM2,并生成轨迹。
此外,如果需要用evo评估工具来评估ROS版ORB-SLAM2生成的轨迹和真值轨迹,可参考之前的ORB-SLAM2学习笔记。
ORB-SLAM2学习笔记系列:
- ORB-SLAM2学习笔记1之Ubuntu20.04+ROS-noetic安装ORB-SLAM2
- ORB-SLAM2学习笔记2之TUM开源数据运行ORB-SLAM2生成轨迹并用evo工具评估轨迹
- ORB-SLAM2学习笔记3之EuRoc开源数据集运行ORB-SLAM2生成轨迹并用evo工具评估轨迹
- ORB-SLAM2学习笔记4之KITTI开源数据集运行ORB-SLAM2生成轨迹并用evo工具评估轨迹
Reference:文章来源:https://uudwc.com/A/MZzak
- https://gitee.com/zengtaiping/image2rosbag_KITTIodometry
- https://cvg.cit.tum.de/data/datasets/rgbd-dataset/file_formats#intrinsic_camera_calibration_of_the_kinect
⭐️???????????????????????????????????????????????文章来源地址https://uudwc.com/A/MZzak