文章来源:https://uudwc.com/A/PaZo
(Q有答疑)visionman基本脚本培训-康耐视Visionpro之Visual Studio -调试快速方法文章来源地址https://uudwc.com/A/PaZo
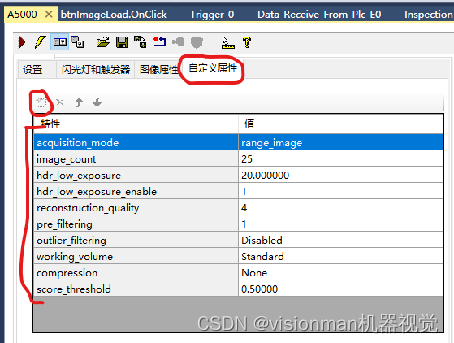
1、打开,运行A5000Viewer

2、修改相应参数,确认图像效果,并在Fifo取像工具自定义属性中添加。
1、本次应用为相机安装在机器人六轴前段,标定块位于相机视野内静止不动,对于相机固定安装稍有差异。
2、机器人带着相机以拍照位为中心,包括拍照位,选择6个拍照位置,保证相机都能看到标定块,且机器人的6个位置姿态都不重复,此时在每个拍照位置时,图片保存至同一个cdb文件中,最终cdb文件中共计6张图片。
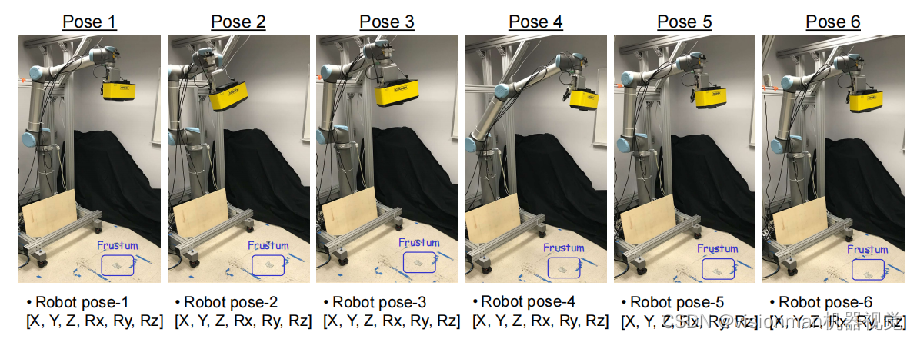
3、机器人的6个拍照位置的数据(X、Y、Z、RX、RY、RZ)放入到向量运算EXCEL表格中,进行向量运算。
