#理想模型图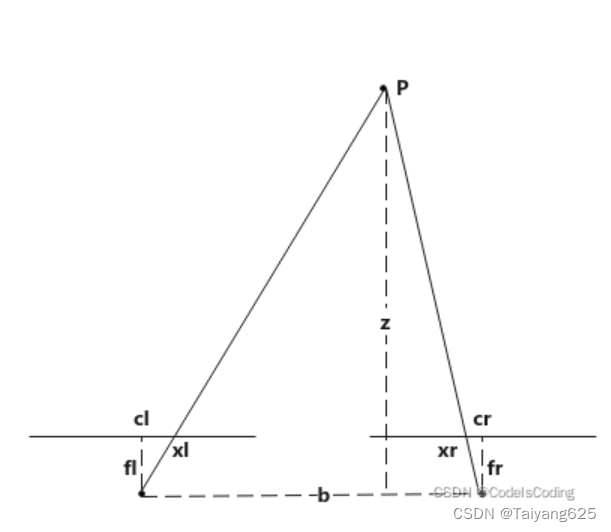
其中: b 为基线,即两个相机原点之间的距离 ;
fl和fr 分别为左右相机的焦距,理想的双目相机fl=fr=f ;
cl和cr 分别为左右相机的光心,理想的双目相机cl=cr ;
xl和xr 分别为空间中的一点P投影在左右相机的图像中的横坐标 ;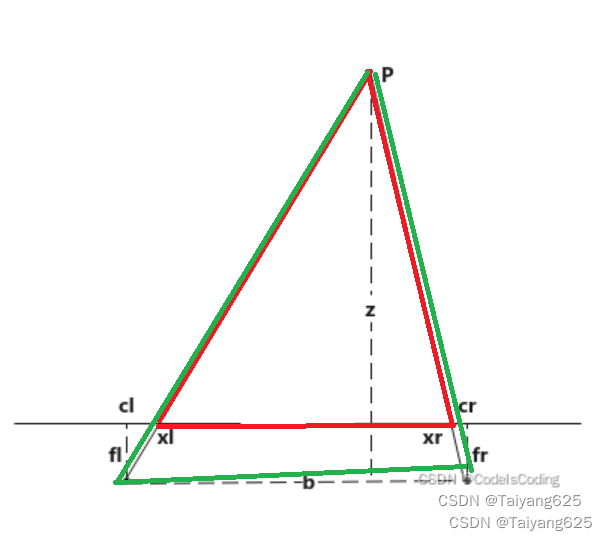
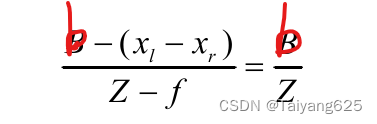
则根据几何关系,可以得到: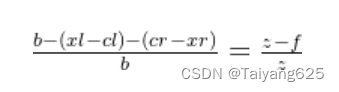
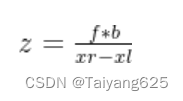
整理得: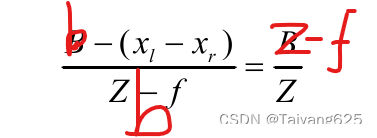
视差原理
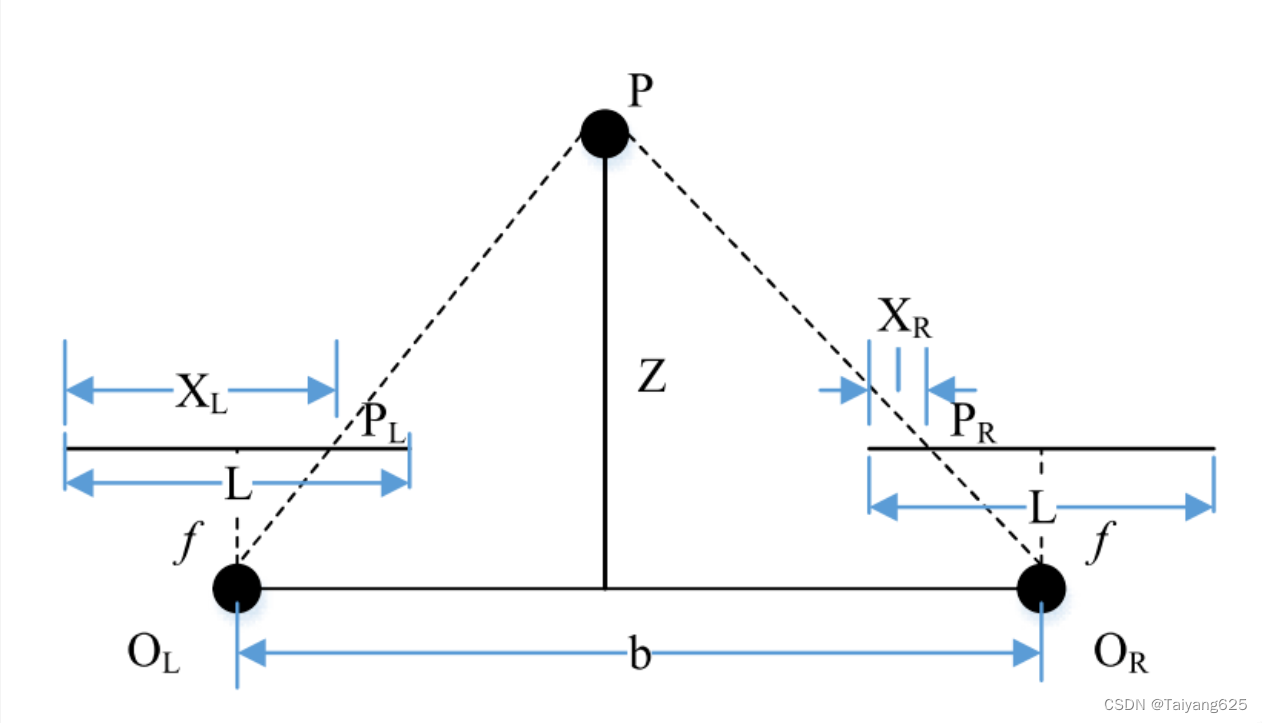
两个相机的投影中心的连线的距离为 b,也叫做基线,三维空间任意一点 P 在左相机的成像点为 PL,在右相机的成像点为PR。根据光的直线传播的原理可知,三维空间点 P 就是两个相机的投影中心点与成像点连线的交点。线段?L和?R分别是左右相机成像点到左成像面的距离,
则点 P 在左右相机的视差可以定义如下: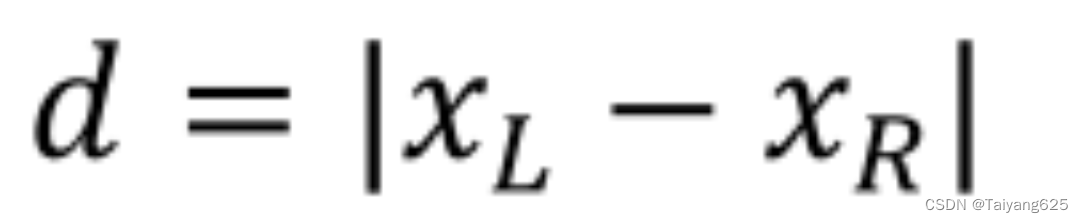
两个成像点PL和PR之间的距离为:
根据相似三角形理论可以得出:
 文章来源:https://uudwc.com/A/R695A
文章来源:https://uudwc.com/A/R695A
则可以得到点 P 到投影中心平面的距离Z: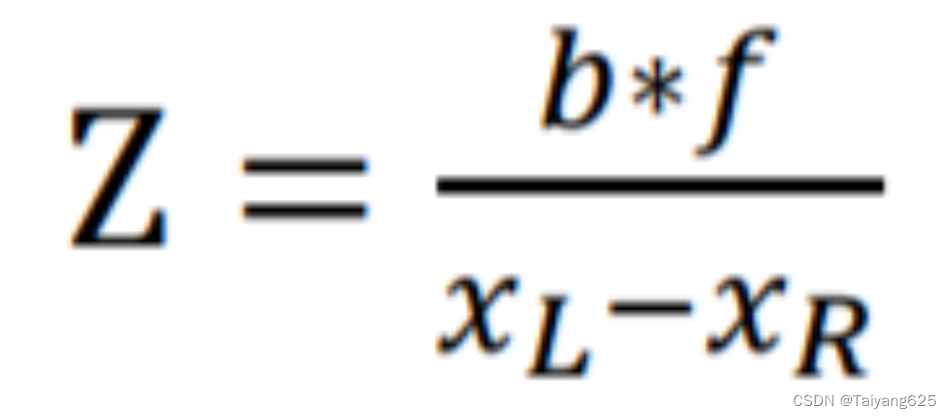 文章来源地址https://uudwc.com/A/R695A
文章来源地址https://uudwc.com/A/R695A
