????欢迎来到本博客❤️❤️??
文章来源地址https://uudwc.com/A/ePkJN
?博主优势:???博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
???本文目录如下:???
目录
?1 概述
?2 运行结果
?3 参考文献
?4 Matlab代码实现

?1 概述
文献来源:
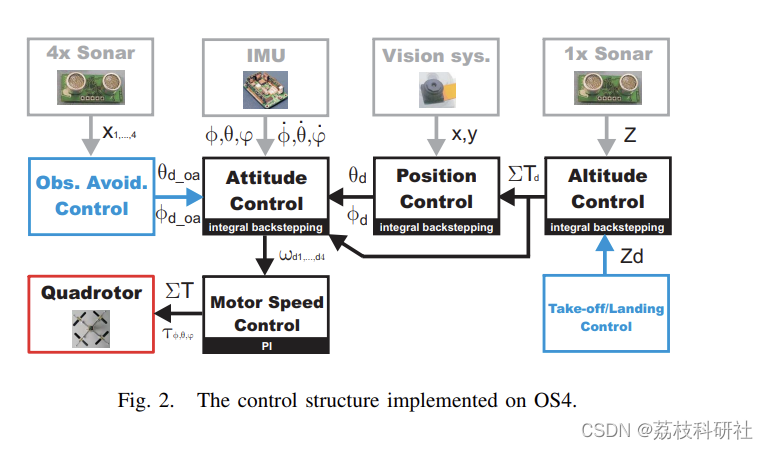
摘要:由于近年来民用和军事领域对无人机的兴趣日益浓厚,自主微型飞行机器人的研究得到了极大的加强。本文总结了OS4项目建模和控制部分的最终成果,重点是四旋翼飞行器的设计和控制。介绍了考虑车辆运动引起的气动系数变化的仿真模型。利用该模型得到的控制参数在不重新整定的情况下成功地应用于直升机。本文的最后一部分描述了控制方法(积分反演)和我们提出的四旋翼飞行器(姿态、高度和位置)的完全控制方案。
最后给出了自主起飞、悬停、着陆和避碰的结果。
原文摘要:
Abstract— The research on autonomous miniature flying robots has intensified considerably thanks to the recent growth of civil and military interest in Unmanned Aerial Vehicles
(UAV). This paper summarizes the final results of the modeling and control parts of OS4 project, which focused on design and control of a quadrotor. It introduces a simulation model which takes into account the variation of the aerodynamical coefficients due to vehicle motion. The control parameters found with this model are successfully used on the helicopter without re-tuning. The last part of this paper describes the control approach (Integral Backstepping) and the scheme we propose for full control of quadrotors (attitude, altitude and position). Finally, the results of autonomous take-off, hover, landing and
collision avoidance are presented.
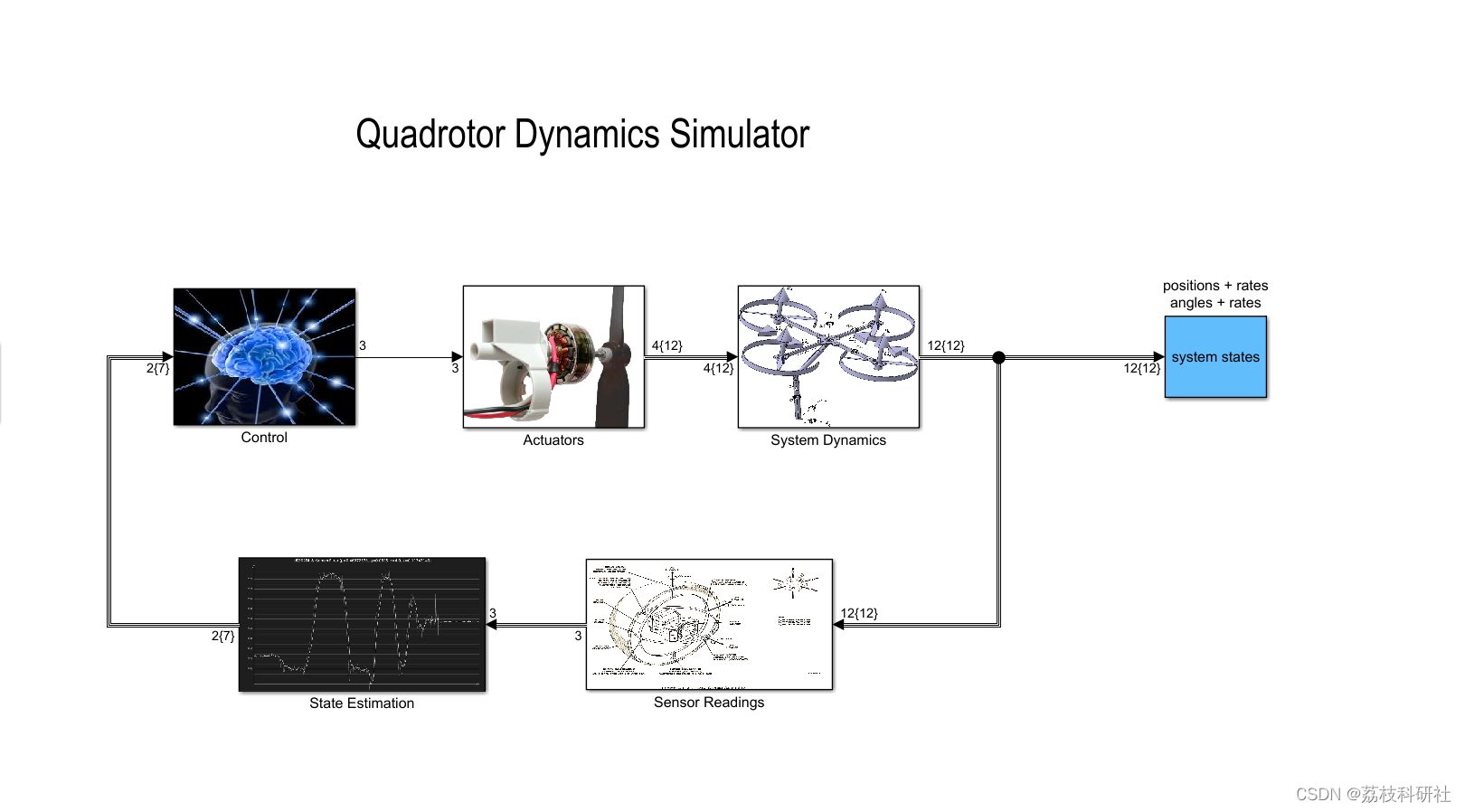
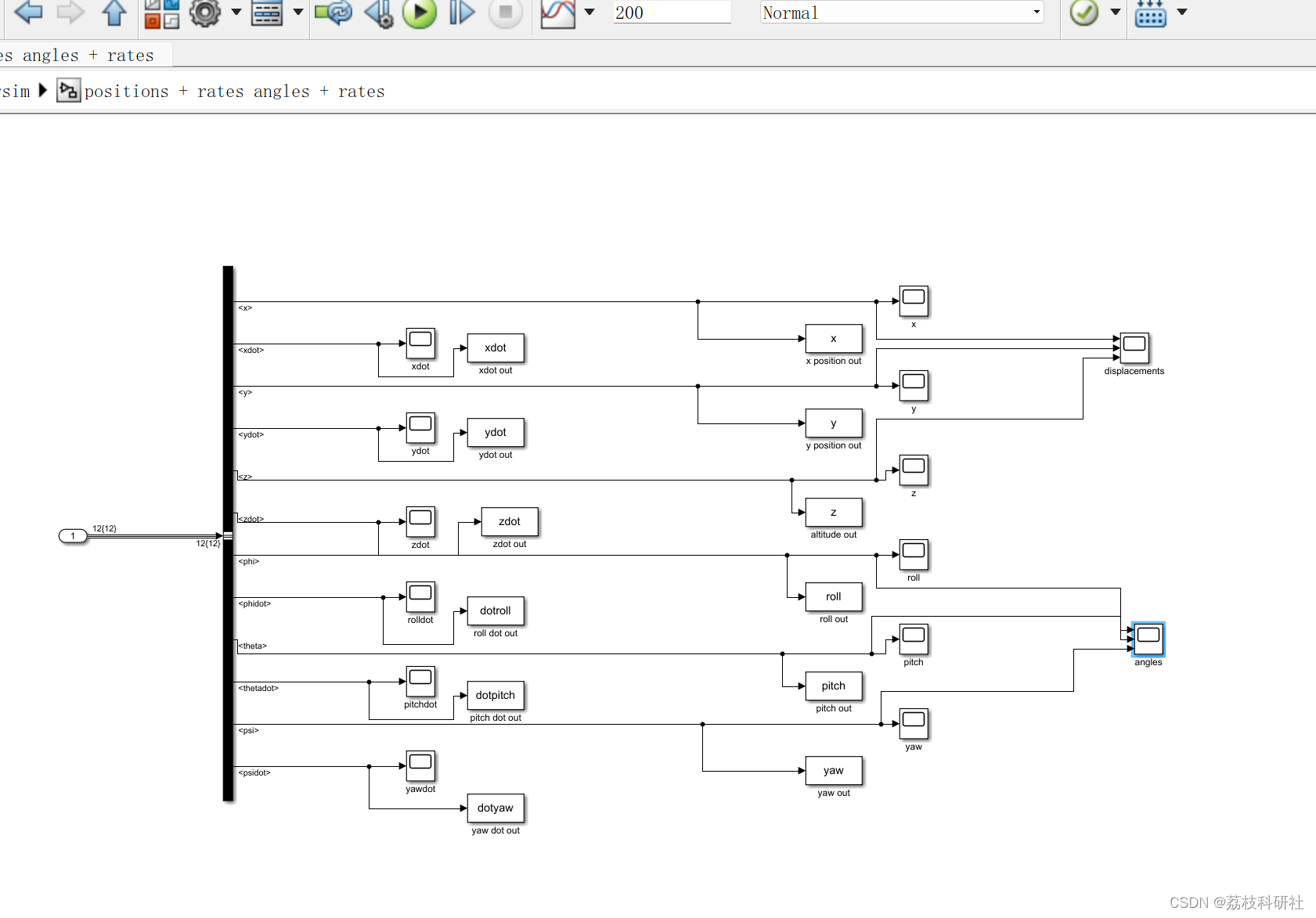
对以下内容进行了建模: - 四旋翼动力学
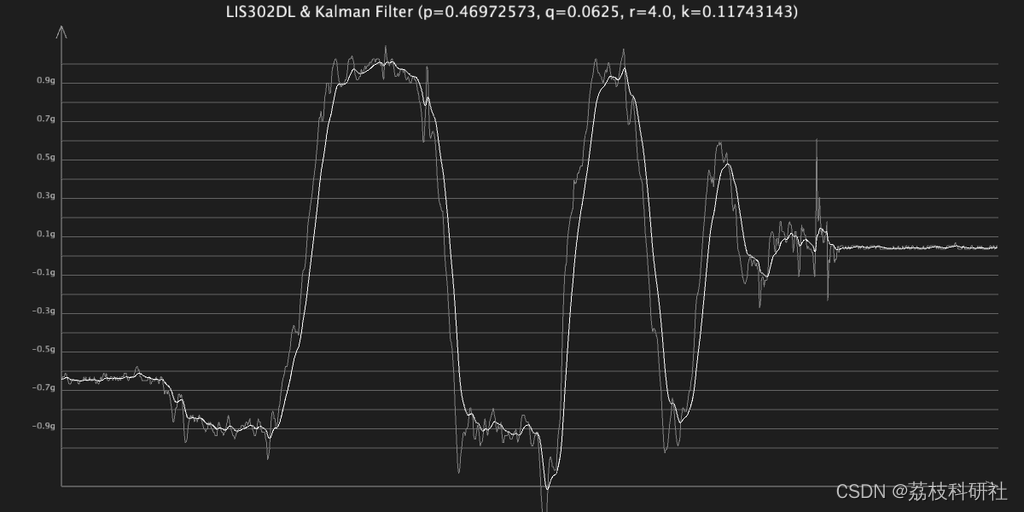
- 电机动力学 - 用于状态估计的卡尔曼滤波 - 简单的传感器模型/ADC转换
以下内容未建模:
- 螺旋桨动力学
- 控制规律
- 动力子系统此SIM卡可用于:
- 系统可行性研究
- 系统性能评估和权衡
- 控制律性能评估

?2 运行结果



部分代码:
%% simulation set up
step_time = 0.5; % simulation step time(sec)
end_time = 1000; % simulation end time (sec)
%end_time = 86400;
%% attitude estimator gains
Tatd = 0.5; % attitude estimator update time (sec)
Tqint = 0.5; % discrete quaternion integration period (sec)
Tsen_out = 0.5; % sensor output period (sec)
TkfProp = 0.5; % Kalman filter propagation period (sec)
KfupdatePeriodInCycle = 1; % Kalman filter update period (propagation cycle)
f_bw_atd = 0.02; % attitude determination bandwidth (hz)
%f_bw_atd = 0.005;
zeta = 0.7;
Krp = (2*pi*f_bw_atd)^2 * eye(3);
Kpp = 2*zeta*2*pi*f_bw_atd*eye(3);
qest0 = [0*1e-4; 0; 0; 1]; % initial estimator quaternion
delta_west0 = zeros(3,1); % initial deviation of estimator angular rate (rad/sec)
max_delta_w = 0.1*pi/180;
delta_w_lim = 2e-4; %0.1/pi/Tqint;
delta_th_lim= 1e-4; %0.1*pi/180/Tqint;
q0 = [0; 0; 0; 1];
%% for estimate error standard deviation prediction calculation
wn=sqrt(diag(Krp));
k=sqrt((wn.^4+4*zeta^2)./(4*zeta*wn));
%% for using Lyapunove equation to solve for expected estimation error
C=[1 0]; K=[Kpp(1,1);Krp(1,1)]; A=[0 1;0 0]-K*C; B=K;
H=[1 0]; K=[Kpp(1,1);Krp(1,1)]*Tatd; F=[1 Tatd;0 1]-K*H; G=K;
%% Kalman filter setups
Fmat = [eye(3) TkfProp*eye(3);zeros(3,3) eye(3)];
Hmat = [eye(3) zeros(3,3)];
therr0 = max([abs(qest0(1:3)); 5*1e-4]); % initial error estimate, assuming q0=[0 0 0 1]
P0 = diag([therr0^2*ones(1,3) 3e-6^2*ones(1,3)]);
R = TkfProp*KfupdatePeriodInCycle*diag(position_uncertainty_var);%1e-3^2*eye(3)*
Q = diag([1e-5^2*ones(1,3), 1e-7^2*ones(1,3)])*TkfProp;
max_rate = pi/180;
P0 = diag([1e-32*ones(1,3) 1e-5^2*ones(1,3)]);
Q = diag([1e-5^2*ones(1,3), 5e-6^2*ones(1,3)])*TkfProp;
max_bias = 1*pi/180/3600;
%% start simulation
Tcapt = Tsen_out; % sim variable capture rate (sec)
?3 参考文献
部分理论来源于网络,如有侵权请联系删除。
 文章来源:https://uudwc.com/A/ePkJN
文章来源:https://uudwc.com/A/ePkJN

