STM32-HAL库06-IIC驱动FM24CL16B非易失存储器
一、所用材料:
STM32VGT6自制控制板
STM32CUBEMX(HAL库软件)
MDK5
二、所学内容:
通过HAL库的硬件IIC对FM24CL16B存储器进行写与读取操作。
三、CUBEMX配置:
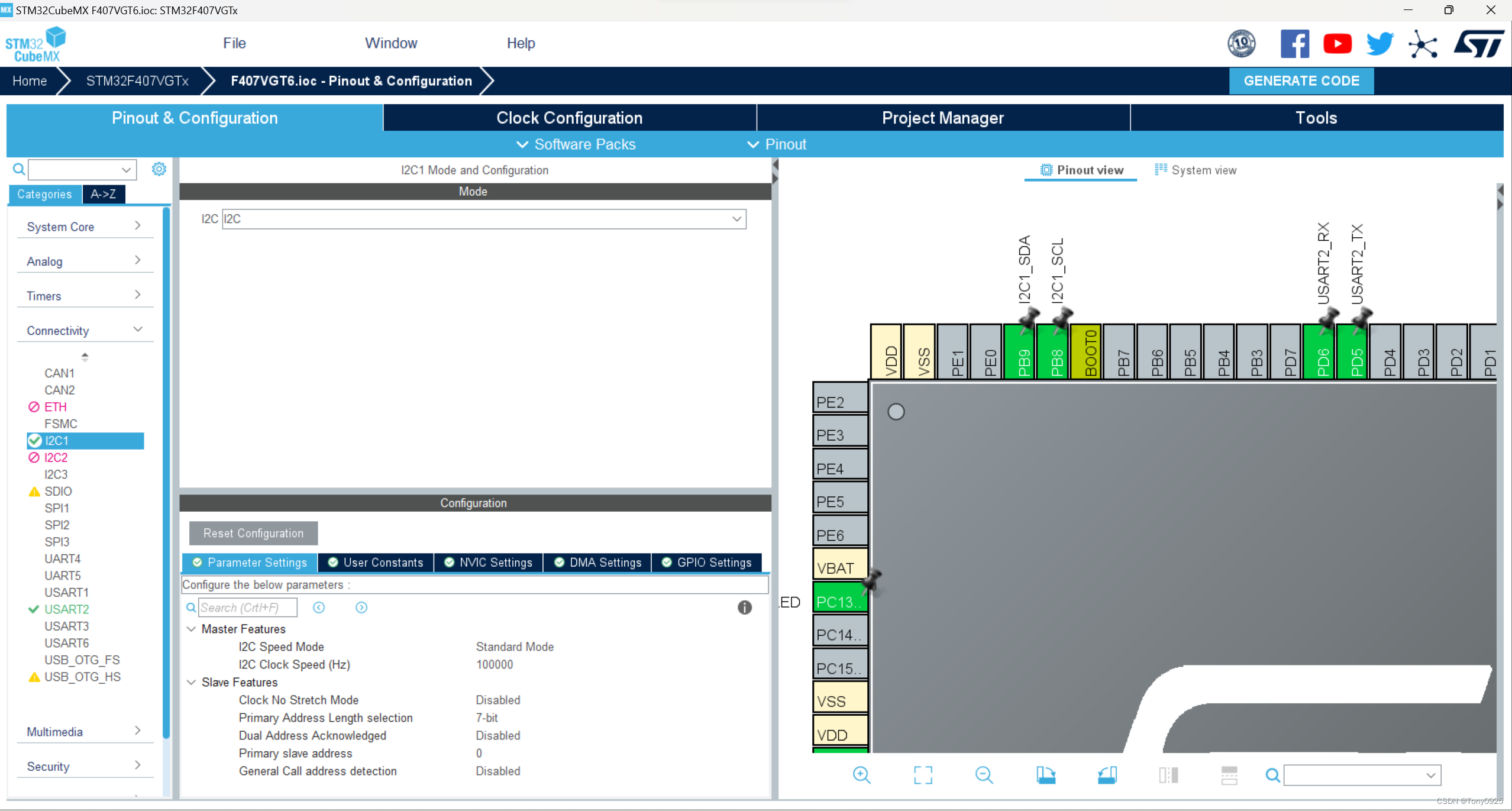
第一步:选取IIC1进行配置
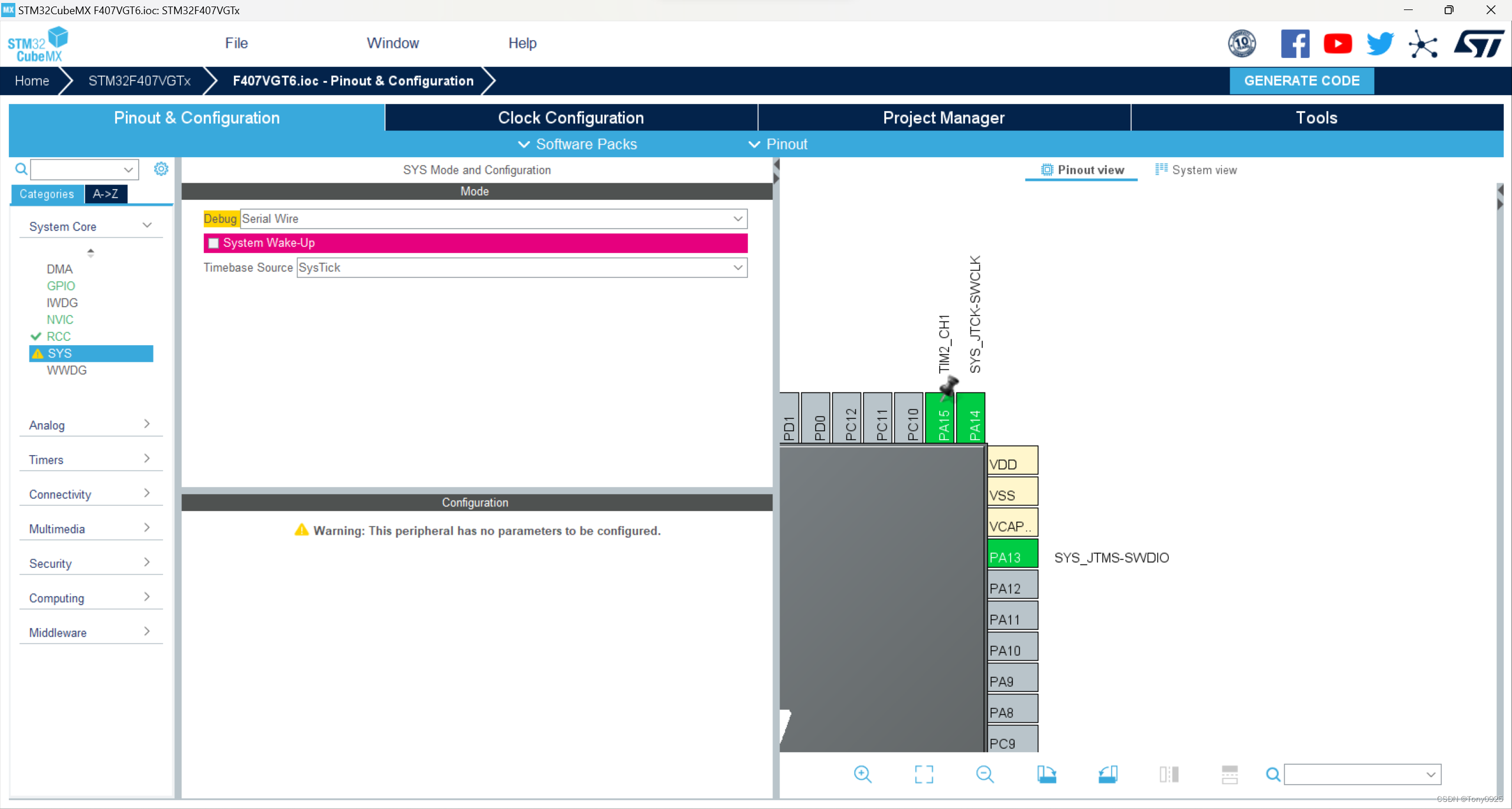
第二步:配置SYS
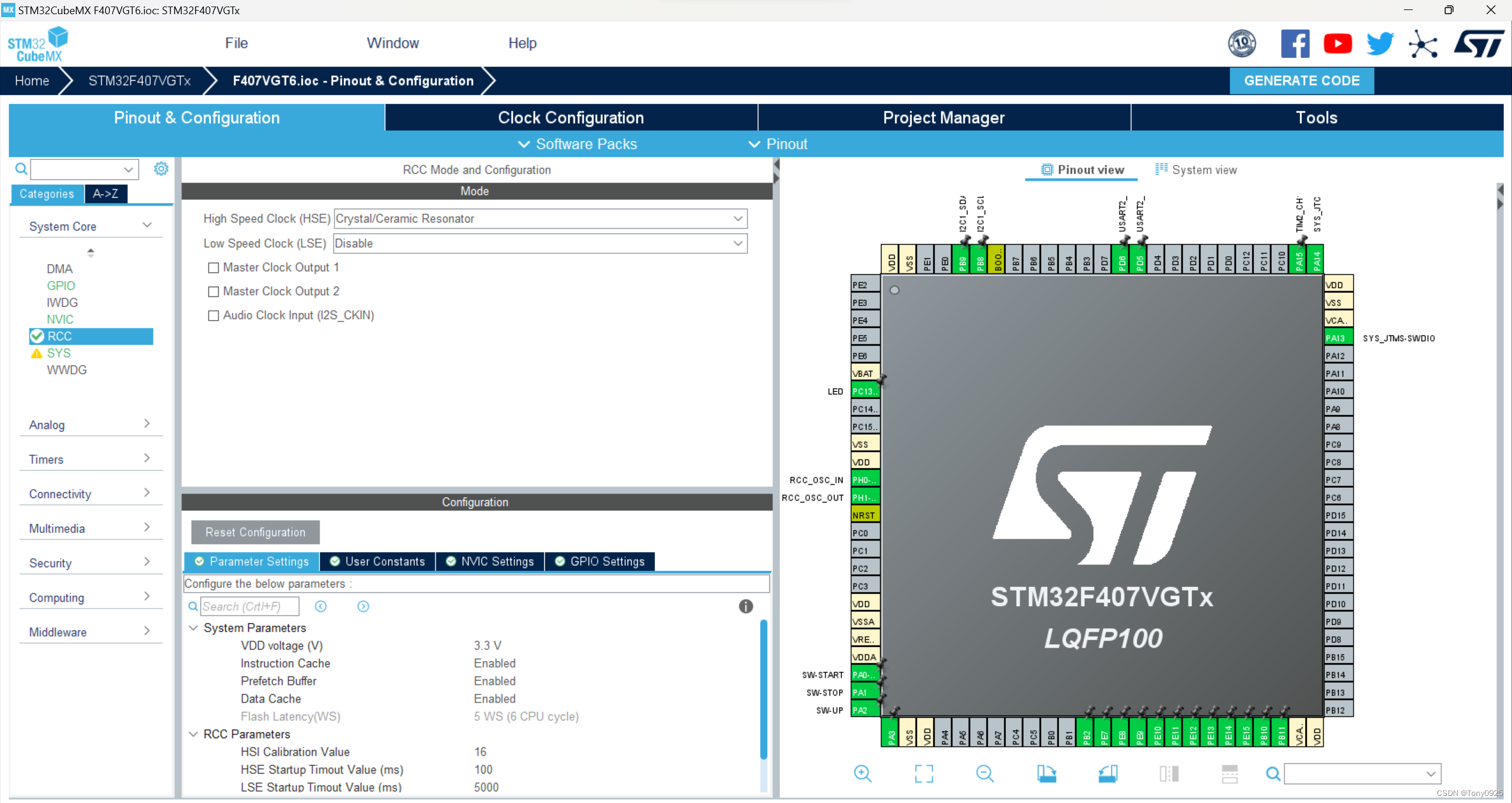
第三步:配置RCC
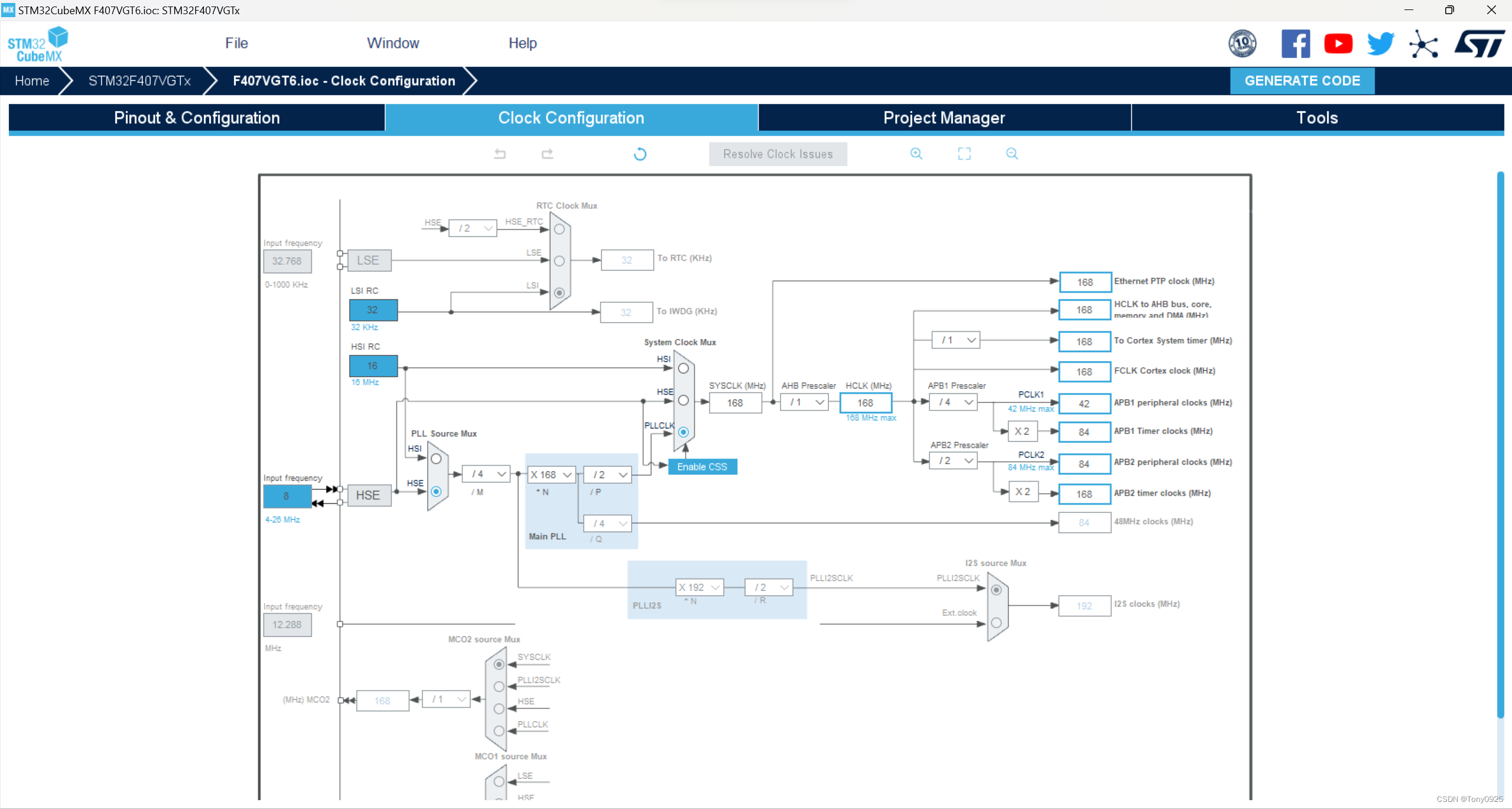
第四步:配置时钟
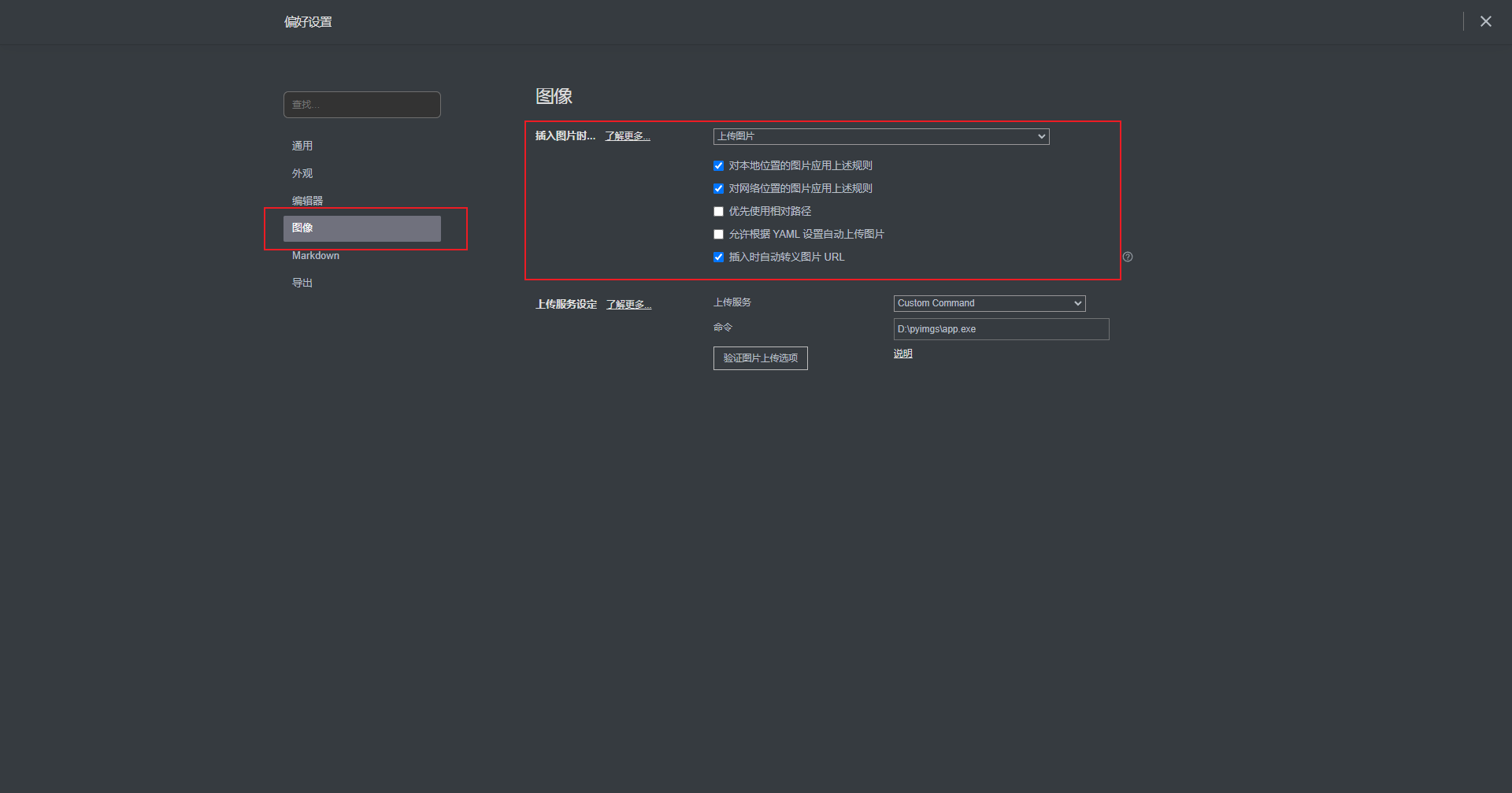
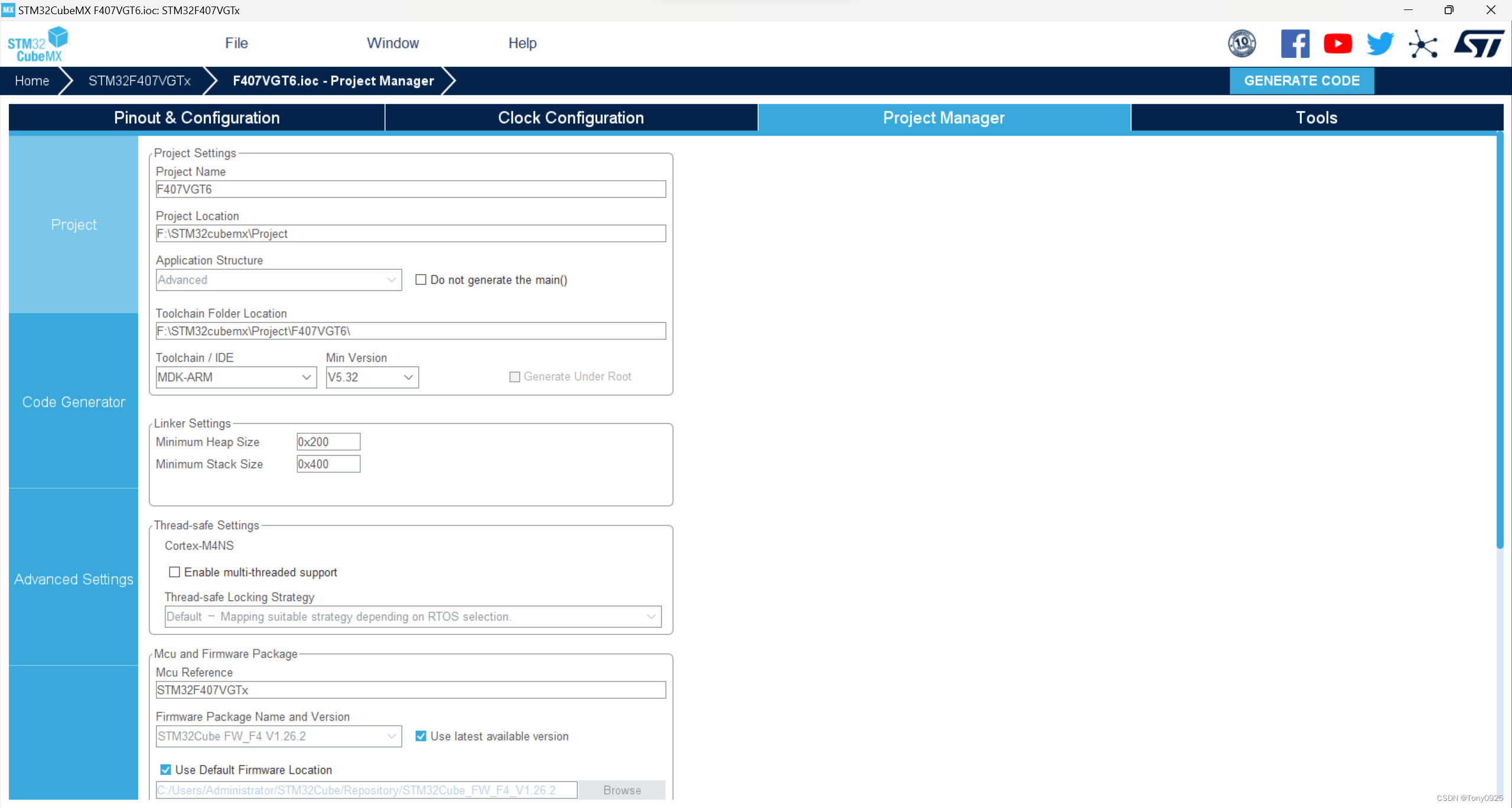
第五步:文件配置
 文章来源:https://uudwc.com/A/gVZ8O
文章来源:https://uudwc.com/A/gVZ8O
四、MDK5程序编写:
1.配置FM24CL16B.h文件
#ifndef __FM24CL16_H
#define __FM24CL16_H
//========移植的时候,根据所选芯片引入相应的头文件==========在main.h里面查看
#include "stm32f4xx_hal.h"
#include "i2c.h"
#define FM_24LC16_Write 0xA0
#define FM_24LC16_Read 0xA1
#define BufferSize 2048
//电机参数内存分配
#define Rs_add 0
#define Rr_add 4
void FM24CL16B_Write_data(uint16_t add , uint8_t data);
uint8_t FM24CL16B_Read_data(uint16_t add);
void Parameter_Write (uint16_t para_add , float para_data);
float Parameter_Read (uint16_t para_add);
#endif
2.配置FM24CL16B.c文件
#include "FM24CL16B.h"
#include "i2c.h"
#include "stdio.h"
/********************************************
函数名称:FM24CL16写数据
函数参数:add—写入数据的地址(0-2048)
data—写入的数据(0-256)
函数解析:向指定地址写入特定数据,并且在写入
后读取一次打印至串口
********************************************/
void FM24CL16B_Write_data(uint16_t add , uint8_t data)
{
HAL_I2C_Mem_Write(&hi2c1, FM_24LC16_Write, add, I2C_MEMADD_SIZE_8BIT,&data,1,0xff);
HAL_Delay(5);//此处延时必加
printf("\r\n EEPROM 24C02 Write Test OK \r\n");
FM24CL16B_Read_data(add);
}
/********************************************
函数名称:FM24CL16读数据
函数参数:add—读数据的地址(0-2048)
函数解析:读取指定地址的数据并返回该数据
********************************************/
uint8_t FM24CL16B_Read_data(uint16_t add)
{
uint8_t Read_data;
HAL_I2C_Mem_Read(&hi2c1, FM_24LC16_Read, add, I2C_MEMADD_SIZE_8BIT,&Read_data,1, 0xff);
printf("地址:%d 16进制:0x%02X 10进制:%d \r\n",add,Read_data,Read_data);
return Read_data;
}
/********************************************
函数名称:浮点数参数写入
函数参数:para_add—写入参数的头地址
para_data-写入的参数浮点数值
函数解析:将浮点数参数值写入到指定的参数地址
********************************************/
void Parameter_Write (uint16_t para_add , float para_data)
{
uint16_t zhengshu ;
uint8_t zhengshu1 ;
uint8_t zhengshu2 ;
uint16_t xiaoshu ;
uint8_t xiaoshu1 ;
uint8_t xiaoshu2 ;
zhengshu = (uint16_t)para_data;
zhengshu1 = zhengshu/256;
zhengshu2 = zhengshu%256;
xiaoshu = (para_data-zhengshu)*1000.0;
xiaoshu1 = xiaoshu/256;
xiaoshu2 = xiaoshu%256;
HAL_I2C_Mem_Write(&hi2c1, FM_24LC16_Write,para_add, I2C_MEMADD_SIZE_8BIT,&zhengshu1,1,0xff);
HAL_Delay(5);//此处延时必加
HAL_I2C_Mem_Write(&hi2c1, FM_24LC16_Write,para_add+1, I2C_MEMADD_SIZE_8BIT,&zhengshu2,1,0xff);
HAL_Delay(5);//此处延时必加
HAL_I2C_Mem_Write(&hi2c1, FM_24LC16_Write,para_add+2, I2C_MEMADD_SIZE_8BIT,&xiaoshu1,1,0xff);
HAL_Delay(5);//此处延时必加
HAL_I2C_Mem_Write(&hi2c1, FM_24LC16_Write,para_add+3, I2C_MEMADD_SIZE_8BIT,&xiaoshu2,1,0xff);
HAL_Delay(5);//此处延时必加
FM24CL16B_Read_data(para_add);
FM24CL16B_Read_data(para_add+1);
FM24CL16B_Read_data(para_add+2);
FM24CL16B_Read_data(para_add+3);
}
/********************************************
函数名称:浮点数参数读取
函数参数:para_add—读取参数的头地址
函数解析:将浮点数参数值从内存中读出并返回
********************************************/
float Parameter_Read (uint16_t para_add)
{
float para_data;
uint8_t zhengshu1 ;
uint8_t zhengshu2 ;
uint8_t xiaoshu1 ;
uint8_t xiaoshu2 ;
zhengshu1 =FM24CL16B_Read_data(para_add);
zhengshu2 =FM24CL16B_Read_data(para_add+1);
xiaoshu1 = FM24CL16B_Read_data(para_add+2);
xiaoshu2 = FM24CL16B_Read_data(para_add+3);
para_data = zhengshu1*256+zhengshu2+(xiaoshu1*256+xiaoshu2)*0.001;
printf("参数值为:%f",para_data);
return para_data;
}
3.配置main.c文件
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_TIM5_Init();
MX_I2C1_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);
__HAL_TIM_CLEAR_IT(&htim5, TIM_IT_UPDATE);
HAL_TIM_Base_Start_IT(&htim5);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE BEGIN 2 */
Parameter_Write (Rr_add , 1458.0597);//写入Rr_add的参数值,并且会读取一次
Parameter_Read (Rs_add); //读取Rs_add的参数值,此值之前已经写进去过了
HAL_Delay(10000);
/* USER CODE END 2 */
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
4.测试
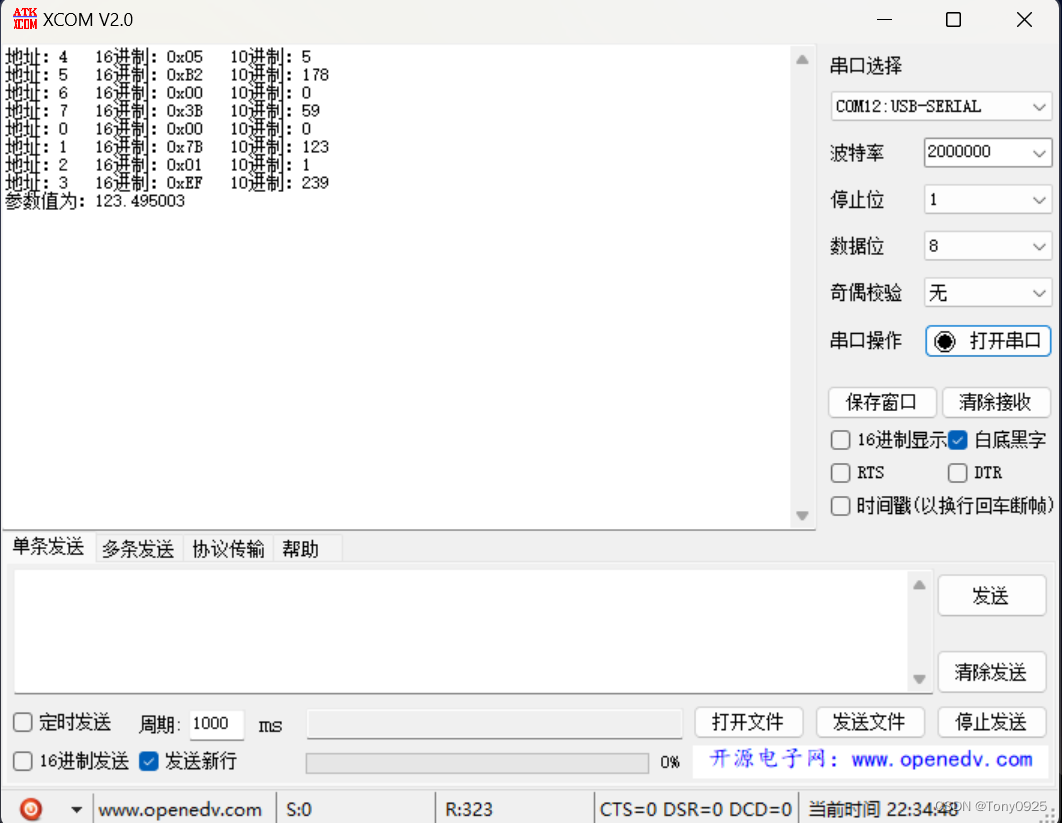 文章来源地址https://uudwc.com/A/gVZ8O
文章来源地址https://uudwc.com/A/gVZ8O