本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第15章 Common I2C总线模块
本章目标
- 使用RASC快速配置Common I2C模块
- 学会使用i2c的API驱动触摸芯片,获取触点数据
15.1 Common I2C模块的使用
RA芯片的I2C分为Simple I2C和Common I2C。Simple I2C就是本书《第8章 SCI SPI》所讲的SCI模块的I2C模式,是使用串行总线来模拟I2C协议,而本章所讲的Common I2C是芯片内部实际存在的一个硬件I2C控制器模块。
得益于FSP的封装,Simple I2C和Common I2C在应用上并没有很大的差别。
15.1.1 I2C模块的配置
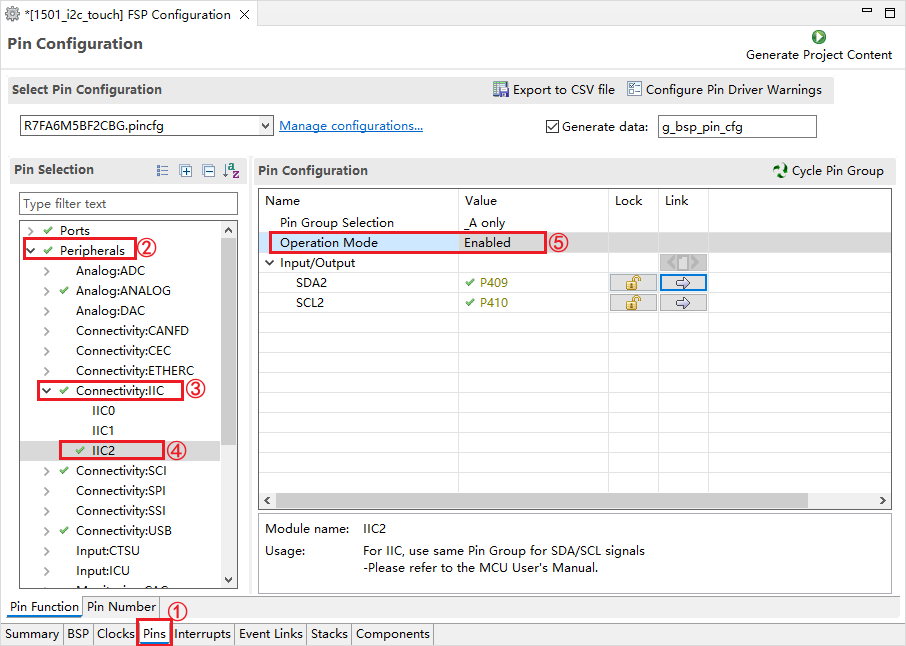
要配置I2C模块,先在RASC的“Pin Configuration”里的“Peripherals”找到“Connectivity:IIC”,然后根据硬件设计选择I2C通道。比如本书使用的是P409/P410作为I2C的SDA和SCL,这两个IO属于I2C2的A组引脚,因而选择“IIC2”,然后在展开的引脚配置中的“Pin Group Selection”选择“_A_only”并且使能操作模式,如下图所示:
接着再去“Stacks”里添加I2C的模块。点击“New Stack”,选择“Connectivity”,再选择里面的“I2C Master(r_iic_master)”。本章目标是作为主机去读取触摸屏的数据,所以选择Master,如下图所示:

当添加了I2C的Master模块后,就要去配置它的参数来。本章实验在RASC中配置I2C的参数具体如下图所示:
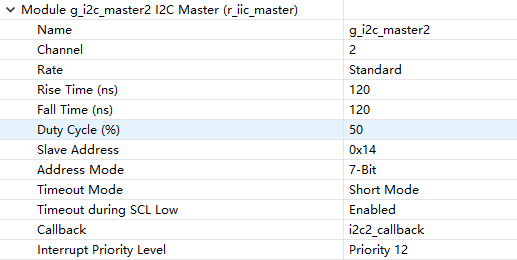
- Name:I2C模块的名称,需要满足C语言字符串标准;
- Channel:I2C模块的通道;
- Rate:I2C通信速率,Standard支持的最大速率400kbps,快速模式最大能达到1Mbps;
- Rise/Fall Time:SCL信号上升沿和下降沿的耗时;

- Duty Cycle:SCL时钟线的占空比,范围是4%~96%,默认是50%;
- Slave Address:从机设备地址,根据从机芯片设置;
- Address Mode:地址模式,支持7-Bit和10-Bit;
- Timeout Mode:数据检测超时模式,支持long mode和short mode。long mode的超时计数器是16bit的,short mode的超时计数器是14bit的;当超时计数溢出都没有检测到数据则通信中止;
- Timeout during SCL Low:在SCL低电平时是否使能超时检测,默认是Enabled;
- Callback:中断回调函数名称,建议和通道匹配,例如i2c1_callback;
- Interrupt Priority Level:I2C中断优先级;
15.1.2 配置信息解读
配置信息分为两部分:引脚的配置信息、I2C模块的配置信息。
使用RASC配置好参数并生成工程后,会在工程的pin_data.c中生成模块的引脚信息,在hal_data.c中生成模块的配置信息。
- I2C模块的引脚信息
I2C涉及的引脚,它们的配置信息在工程的pin_data.c中生成。在RASC里配置的每一个引脚,都会在pin_data.c生成一个ioport_pin_cfg_t数组项,里面的内容跟配置时选择的参数一致。代码如下:
const ioport_pin_cfg_t g_bsp_pin_cfg_data[] = {
......(省略内容)
{ .pin = BSP_IO_PORT_04_PIN_09,
.pin_cfg = ((uint32_t) IOPORT_CFG_DRIVE_MID
| (uint32_t) IOPORT_CFG_PERIPHERAL_PIN
| (uint32_t) IOPORT_PERIPHERAL_IIC)},
{ .pin = BSP_IO_PORT_04_PIN_10,
.pin_cfg = ((uint32_t) IOPORT_CFG_DRIVE_MID
| (uint32_t) IOPORT_CFG_PERIPHERAL_PIN
| (uint32_t) IOPORT_PERIPHERAL_IIC)},
......(省略内容)
};
这个常量数组将P5409和P410配置为I2C外设复用功能。
- I2C模块的配置信息
I2C的配置信息会在hal_data.c中的i2c_master_cfg_t结构体类型常量g_i2c_master2_cfg中定义,代码如下:
const i2c_master_cfg_t g_i2c_master2_cfg =
{
.channel = 2,
.rate = I2C_MASTER_RATE_STANDARD,
.slave = 0x14,
.addr_mode = I2C_MASTER_ADDR_MODE_7BIT,
......(省略内容)
.p_callback = i2c2_callback,
.p_context = NULL,
......(省略内容)
.ipl = (12),
.p_extend = &g_i2c_master2_extend,
};
- 第03行:通道设置为2;
- 第04行:通信速率设置为标准速率;
- 第05行:从机地址是0x14;
- 第06行:地址模式为7bit模式;
- 第08行:设置中断函数名为i2c2_callback;
使用I2C的open函数时,就会使用这个常量来初始化I2C模块。
15.1.3 中断回调函数
在g_i2c_master2_cfg用到了名为“i2c1_callback”的函数,此函数仅在hal_data.h中进行了如下声明,但是没有实现:
#ifndef i2c1_callback
void i2c1_callback(i2c_master_callback_args_t * p_args);
#endif
需要用户实现这个函数,例如:
void i2c1_callback(i2c_master_callback_args_t * p_args)
{
switch (p_args->event)
{
}
}
这个中断回调函数的参数是i2c_master_callback_args_t结构体指针,此结构体的原型如下:
typedef struct st_i2c_master_callback_args
{
void const * p_context; ///< Pointer to user-provided context
i2c_master_event_t event; ///< Event code
} i2c_master_callback_args_t;
其中事件成员是一个枚举类型,囊括的事件类型有:
typedef enum e_i2c_master_event
{
I2C_MASTER_EVENT_ABORTED = 1, ///< A transfer was aborted
I2C_MASTER_EVENT_RX_COMPLETE = 2, ///< A receive operation was completed successfully
I2C_MASTER_EVENT_TX_COMPLETE = 3 ///< A transmit operation was completed successfully
} i2c_master_event_t;
从此可以知道,触发I2C中断的原因有:发送完成、接收完成、传输中止。它们触发中断后,会调用回调函数以执行用户的代码。
15.1.4 API接口及其应用
在I2C模块的FSP库函数头文件r_i2c_master_api.h中,定义了I2C主机设备的操作函数结构体i2c_master_api_t,原型如下:
/** Interface definition for I2C access as master */
typedef struct st_i2c_master_api
{
fsp_err_t (* open)(i2c_master_ctrl_t * const p_ctrl,
i2c_master_cfg_t const * const p_cfg);
fsp_err_t (* read)(i2c_master_ctrl_t * const p_ctrl,
uint8_t * const p_dest,
uint32_t const bytes,
bool const restart);
fsp_err_t (* write)(i2c_master_ctrl_t * const p_ctrl,
uint8_t * const p_src,
uint32_t const bytes,
bool const restart);
fsp_err_t (* abort)(i2c_master_ctrl_t * const p_ctrl);
fsp_err_t (* slaveAddressSet)(i2c_master_ctrl_t * const p_ctrl,
uint32_t const slave,
i2c_master_addr_mode_t const addr_mode);
fsp_err_t (* callbackSet)(i2c_master_ctrl_t * const p_api_ctrl,
void (* p_callback)(i2c_master_callback_args_t *),
void const * const p_context,
i2c_master_callback_args_t * const p_callback_memory);
fsp_err_t (* statusGet)(i2c_master_ctrl_t * const p_api_ctrl,
i2c_master_status_t * p_status);
fsp_err_t (* close)(i2c_master_ctrl_t * const p_ctrl);
} i2c_master_api_t;
I2C主机设备支持的操作有:open/read/write/close等,FSP在r_iic_master.c中实现了这个结构体:
/* IIC Implementation of I2C device master interface */
i2c_master_api_t const g_i2c_master_on_iic =
{
.open = R_IIC_MASTER_Open,
.read = R_IIC_MASTER_Read,
.write = R_IIC_MASTER_Write,
.abort = R_IIC_MASTER_Abort,
.slaveAddressSet = R_IIC_MASTER_SlaveAddressSet,
.close = R_IIC_MASTER_Close,
.statusGet = R_IIC_MASTER_StatusGet,
.callbackSet = R_IIC_MASTER_CallbackSet
};
本章以对I2C主机设备的打开关闭和读写为例进行分析。
- 打开I2C主机设备
打开I2C主机设备的函数指针原型如下:
/** Opens the I2C Master driver and initializes the hardware.
* @param[in] p_ctrl Pointer to control block. Must be declared by user. Elements are set here.
* @param[in] p_cfg Pointer to configuration structure.
*/
fsp_err_t (* open)(i2c_master_ctrl_t * const p_ctrl, i2c_master_cfg_t const * const p_cfg);
- p_ctrl:指向I2C主机控制块,比如g_i2c_master2_ctrl;
- p_cfg:指向I2C主机参数配置结构体常量,比如g_i2c_master2_cfg;
p_ctrl的类型是iic_master_instance_ctrl_t结构体,在I2C通信的时候会改变此结构体中的设备状态、地址值、读写状态和应答状态等。
p_cfg的类型是i2c_master_cfg_t,此结构体被用来表示I2C主机的配置,例如I2C的通道、中断号、收发函数和中断回调函数等。
用户可以参照如下代码来打开I2C主机设备,它的内部会进行初始化:
fsp_err_t err = g_i2c_master2.p_api->open(g_i2c_master2.p_ctrl, g_i2c_master2.p_cfg);
if (FSP_SUCCESS != err)
{
printf("%s %d\r\n", __FUNCTION__, __LINE__);
return;
}
- 关闭I2C主机设备
关闭I2C设备的函数指针原型如下:
fsp_err_t (* close)(i2c_master_ctrl_t * const p_ctrl);
它的参数p_ctrl指向I2C主机控制块,此函数会将控制块中的I2C状态改变为关闭状态。
- I2C接收数据函数
I2C接收数据的函数指针原型如下:
fsp_err_t (* read)(i2c_master_ctrl_t * const p_ctrl,
uint8_t * const p_dest,
uint32_t const bytes,
bool const restart);
- p_ctrl:指向I2C主机设备控制块;
- p_dest:目的数据(用来接收数据)的地址;
- bytes:要接收的数据个数,单位是字节;
- restart:主机接收完一帧数据后的操作,true-接收完一帧数据后主机不发送停止信号而是发送Start信号继续传输,false-接收完一帧数据后主机发送停止信号。
开发者可以参考如下代码来读取数据:
fsp_err_t err = g_i2c_master2.p_api->read(g_i2c_master2.p_ctrl, buf, len, 0);
if (FSP_SUCCESS != err)
{
printf("%s %d\r\n", __FUNCTION__, __LINE__);
return;
}
- I2C发送数据函数
I2C主机设备向从机设备发送数据的函数指针原型如下:
fsp_err_t (* write)(i2c_master_ctrl_t * const p_ctrl,
uint8_t * const p_src,
uint32_t const bytes,
bool const restart);
- p_ctrl:执行I2C主机设备控制块,主机发送数据的时候会根据控制块的地址等信息发起开始信号、应答信号等;
- p_dest:目的数据(用来接收数据)的地址;
- bytes:要发送的数据个数,单位是字节;
- restart:发送完此帧数据后的操作:true表示不会发出Stop信号而是马上发出Start信号——这样可以一直霸占I2C总线,false表示发出Stop信号(大家重新竞争I2C总线);
开发者可以参考如下代码来进行I2C的数据发送:
fsp_err_t err = g_i2c_master2.p_api->write(g_i2c_master2.p_ctrl, tmpbuf, 2, 0);
if (FSP_SUCCESS != err)
{
printf("%s %d\r\n", __FUNCTION__, __LINE__);
return;
}
15.2 Common I2C驱动触摸屏实验
15.2.1 硬件连接
本章使用的是外接触摸屏,使用FPC排线与主板相连,FPC的I2C原理图如下图所示:
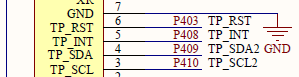
使用的引脚是P409和P410。
15.2.2 GT911驱动解析
GT911是一款拥有5点电容触摸点位、拥有26个驱动通道和14个感应通道的触控芯片,可以同时识别5个触摸点位的实时准确位置、移动轨迹和触摸面积,并且根据主控需要,读取相应点为的触摸信息。
GT911的通信是标准的I2C通信协议,主机在和GT911进行I2C通信的时候需要满足I2C总线的标准协议。GT911的I2C从机设备地址定义如下图所示:

它支持两种地址,使用哪个地址取决于GT911发生复位后INT引脚的电平。如果复位时,INT引脚是高电平,则地址是0x14/0x28/0x29;否则就是0x5D,0xBA/0xBB。
本章实验设计选择的是地址0x14。
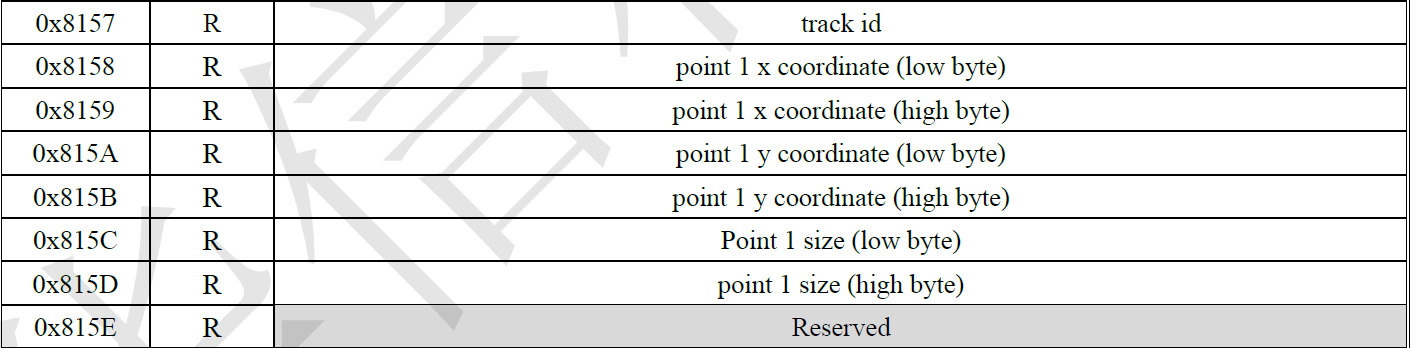
通过发送指令和读写数据来驱动GT911,不同的指令支持的数据个数不同:一个指令对应一个寄存器的数据,也可能一个指令对应N个寄存器的数据。以读取点位数据指令0x8157为例,用户发送0x8157指令后可以连续读取7个字节的数据(触控点位ID和触控位置信息):
15.2.3 GT911驱动程序
本章实验仅仅是简单地获取触点的位置信息。对于触摸设备,因对它的基本要求无非就是获取触摸点位信息,因而本章将抽象为“触摸设备”,在drv_touch.h中用一个结构体来描述这一类触摸设备:
typedef struct TouchDev{
char *name;
void (*Init)(struct TouchDev *ptDev);
bool (*Read)(struct TouchDev *ptDev, unsigned short *pX, unsigned short *pY);
}TouchDev, *PTouchDev;
对于这一类触摸设备,应用层对它的操作只涉及:初始化、读取触摸位置。因而TouchDev结构体里只有Init、Read两个函数指针。
而对于具体的触摸驱动芯片,需要实现自己的TouchDev结构体。本章在drv_gt911.c中进行了实现TouchDev结构体,接下来对它的函数进行一一说明。
- 中断回调函数
在I2C通信过程中,需要上一次的传输完成后才能开始下一次传输,因而需要通过I2C的中断触发事件来判断上一次传输是否已经完成,代码如下:
static volatile bool gI2C2TxCplt = false;
static volatile bool gI2C2RxCplt = false;
void i2c2_callback(i2c_master_callback_args_t * p_args)
{
switch (p_args->event)
{
case I2C_MASTER_EVENT_TX_COMPLETE:
{
gI2C2TxCplt = true;
break;
}
case I2C_MASTER_EVENT_RX_COMPLETE:
{
gI2C2RxCplt = true;
break;
}
default:
{
gI2C2TxCplt = gI2C2RxCplt = false;
break;
}
}
}
- 第07~11行:如果触发中断的事件类型是发送完成事件,则将发送完成标志位置true;
- 第12~16行:如果触发中断的事件类型是接收完成事件,则将接收完成标志位置true;
- 收发超时等待函数
本章实现了2个等待函数,里面加入了超时机制,代码如下:
static void I2C2WaitTxCplt(void)
{
uint16_t wTimeOut = 100;
while(!gI2C2TxCplt && wTimeOut)
{
HAL_Delay(1);
wTimeOut--;
}
gI2C2TxCplt = false;
}
static void I2C2WaitRxCplt(void)
{
uint16_t wTimeOut = 100;
while(!gI2C2RxCplt && wTimeOut)
{
HAL_Delay(1);
wTimeOut--;
}
gI2C2RxCplt = false;
}
- 写GT911寄存器函数
写GT911的寄存器时,要发出寄存器地址、寄存器数据。数据个数可能各有不同,函数里动态分配内存,用来保存寄存器地址、寄存器数据,然后一次性发送出去。参考如下代码:
static void GT911DrvWriteReg(uint16_t reg, uint8_t *buf, uint8_t len)
{
uint8_t regl = (uint8_t)(reg & 0xff);
uint8_t regh = (uint8_t)(reg>>8);
uint8_t * write_package = (uint8_t*)malloc((len + 2) * sizeof(uint8_t));
memcpy(write_package, ®h, 1);
memcpy(write_package + 1, ®l, 1);
memcpy(write_package + 2, buf, len);
fsp_err_t err = g_i2c_master2.p_api->write(g_i2c_master2.p_ctrl, write_package, len + 2, 0);
if (FSP_SUCCESS != err)
{
printf("%s %d\r\n", __FUNCTION__, __LINE__);
return;
}
I2C2WaitTxCplt();
free(write_package);
}
- 第05~08行:根据传入的数据长度,动态分配数据包,并将指令和数据进行打包组合,以便调用I2C的write函数一次性发送出去;
- 第09行:调用write函数发送数据包,发送完之后不再接着发送数据,因而最后一个参数restart=0;
- 读GT911寄存器函数
读寄存器时,要先发出寄存器地址,再读入数据。代码如下:
static void GT911DrvReadReg(uint16_t reg, uint8_t *buf, uint8_t len)
{
uint8_t tmpbuf[2];
tmpbuf[0] = (uint8_t)(reg >> 8);
tmpbuf[1] = (uint8_t)(reg &0xff);
fsp_err_t err = g_i2c_master2.p_api->write(g_i2c_master2.p_ctrl, tmpbuf, 2, 0);
if (FSP_SUCCESS != err)
{
printf("%s %d\r\n", __FUNCTION__, __LINE__);
return;
}
I2C2WaitTxCplt();
err = g_i2c_master2.p_api->read(g_i2c_master2.p_ctrl, buf, len, 0);
if (FSP_SUCCESS != err)
{
printf("%s %d\r\n", __FUNCTION__, __LINE__);
return;
}
I2C2WaitRxCplt();
}
- 各类ID读取函数
GT911有多种ID供用户获取,以获取GT911的生产ID为例,它需要主机发送寄存器指令0x8140给GT911,然后读取4个字节的ID数据,代码如下:
static uint32_t GT911DrvReadProductID(void)
{
uint32_t id = 0;
GT911DrvReadReg(GT911_PRODUCT_ID_REG, (uint8_t*)&id ,4);
return id;
}
其它的ID也可以参考这样的写法实现,本章的工程1501_i2c_touch为读者封装了这几个ID读取函数:
static uint32_t GT911DrvReadProductID(void);
static uint32_t GT911DrvReadVendorID(void);
static uint8_t GT911DrvReadVersion(void);
static uint8_t GT911DrvGetGSTID(void);
- 清除点位寄存器
在每次读取了触摸点位寄存器的数据后,需要将寄存器的数据清除掉,以便下一次触摸时更新寄存器的数据。如果不清除坐标寄存器的数据的话,每次读取都会得到一个固定值0x7F。
清除坐标寄存器的地址是0x814E,用户只需要往这个寄存器写入一个零即可,代码如下:
static void GT911DrvClearBuf(void)
{
uint8_t data = {0};
GT911DrvWriteReg(GT911_CLEARBUF_REG, (uint8_t*)&data, 1);
}
- 抽象GT911触摸屏设备对象
对于GT911触摸设备,本章根据其参数特性进行了封装,来表示GT911的触摸区域和触摸点位,参考以下在drv_gt911.h中的代码设计:
typedef enum{
TP_ROT_NONE = 0,
TP_ROT_90,
TP_ROT_180,
TP_ROT_270
} TouchRotation_t;
/**用于存放每一个触控点的id,坐标,大小**/
typedef struct TouchPointInfo{
unsigned char id;
unsigned short x;
unsigned short y;
unsigned short size;
}TouchPointInfo_t;
/**类结构体**/
typedef struct TouchDrv{
unsigned char ucAddr;
unsigned short wHeight;
unsigned short wWidth;
TouchRotation_t tRotation;
TouchPointInfo_t tPointsInfo[TOUCH_POINT_TOTAL]; //用于存储五个触控点的坐标
}TouchDrv_t;
在后续的设计中,通过定义结构体TouchDrv_t变量来表示一个GT911设备:
static struct TouchDrv gTP;
- 读取GT911触摸点位函数
在分析GT911的数据读写时,曾以读取某一个点位的数据为例,了解了一个点位拥有7个数据信息。而GT911共有5个点位信息可以获取,对应的寄存器地址在drv_gt911.h中以宏定义的形式体现:
#define GT_TP1_REG 0X814F //第一个触摸点数据地址
#define GT_TP2_REG 0X8157 //第二个触摸点数据地址
#define GT_TP3_REG 0X815F //第三个触摸点数据地址
#define GT_TP4_REG 0X8167 //第四个触摸点数据地址
#define GT_TP5_REG 0X816F //第五个触摸点数据地址
什么情况下才需要去读取点位信息呢?有触摸事件发生的时候。而用户该如何获知GT911是否有被触摸呢?它用一个寄存器来表示:

- Bit-7:buffer_status,1-有触摸数据等待主机读取;0-没有数据;
- Bit-6:large detect,1-表示有大片区域被触摸了;
- Bit-4:HaveKey,1-正在被触摸;0-没有被触摸或者松开触摸了;
- Bit-[3:0]:触摸的点数;
用户可以根据这6个寄存器指令来获取每次触摸的点位信息了,参考如下代码:
static bool GT911DrvIsTouched(TouchDrv_t * tp)
{
uint8_t touched_state, touch_num, buffer_status;
touched_state = GT911DrvGetGSTID();
touch_num = touched_state & 0xf; //触点数量
buffer_status = (touched_state >> 7) & 1; // 帧状态
if(buffer_status == 1 && (touch_num <= TOUCH_POINT_TOTAL) && (touch_num > 0))
{
uint16_t pointers_regs[TOUCH_POINT_TOTAL] = {GT_TP1_REG, GT_TP2_REG, GT_TP3_REG, GT_TP4_REG, GT_TP5_REG};
// 获取每个触控点的坐标值并保存
for (int i = 0; i < touch_num; ++i)
{
uint8_t point_info_per_size = 7;
uint8_t * point_info_p = malloc(point_info_per_size * sizeof(uint8_t ));
GT911DrvReadReg(pointers_regs[i], point_info_p, point_info_per_size);
tp->tPointsInfo[i].id = point_info_p[0];
tp->tPointsInfo[i].x = (unsigned short)(point_info_p[1] + (point_info_p[2] << 8));
tp->tPointsInfo[i].y = (unsigned short)(point_info_p[3] + (point_info_p[4] << 8));
tp->tPointsInfo[i].size = (unsigned short)(point_info_p[5] + (point_info_p[6] << 8));
free(point_info_p);
//旋转方向
uint16_t temp;
switch (tp->tRotation)
{
case TP_ROT_NONE:
tp->tPointsInfo[i].x = tp->wWidth - tp->tPointsInfo[i].x;
tp->tPointsInfo[i].y = tp->wHeight - tp->tPointsInfo[i].y;
break;
case TP_ROT_270:
temp = tp->tPointsInfo[i].x;
tp->tPointsInfo[i].x = tp->wWidth - tp->tPointsInfo[i].y;
tp->tPointsInfo[i].y = temp;
break;
case TP_ROT_180:
// tp->tPointsInfo[i].x = tp->tPointsInfo[i].x;
// tp->tPointsInfo[i].y = tp->tPointsInfo[i].y;
break;
case TP_ROT_90:
temp = tp->tPointsInfo[i].x;
tp->tPointsInfo[i].x = tp->tPointsInfo[i].y;
tp->tPointsInfo[i].y = tp->wHeight - temp;
break;
default:
break;
}
}
GT911DrvClearBuf();
return true;
}
//必须给GT911_POINT_INFO缓冲区置0,不然读取的数据一直为128!!!!
GT911DrvClearBuf();
return false;
}
另外,为了和之前抽象出来的触摸设备(TouchDev)相匹配,还要在此基础上封装一个Read函数:
static bool GT911DrvRead(struct TouchDev *ptDev, unsigned short *pX, unsigned short *pY)
{
if(NULL == ptDev->name) return false;
if(GT911DrvIsTouched(&gTP))
{
*pX = gTP.tPointsInfo[0].x;
*pY = gTP.tPointsInfo[0].y;
return true;
}
return false;
}
- GT911初始化函数
本章实验并未对GT911进行更精细的设置,因而并不没有修改它的寄存器。
本章的初始化函数仅仅初始化I2C设备、读取GT911的ID和触摸范围,参考如下代码:
static void GT911DrvInit(struct TouchDev *ptDev)
{
if(NULL == ptDev->name) return;
uint8_t buf[4];
gTP.ucAddr = (uint8_t)g_i2c_master2.p_cfg->slave;
gTP.tRotation = TP_ROT_NONE;
/* 初始化I2C驱动 */
fsp_err_t err = g_i2c_master2.p_api->open(g_i2c_master2.p_ctrl, g_i2c_master2.p_cfg);
if (FSP_SUCCESS != err)
{
printf("%s %d\r\n", __FUNCTION__, __LINE__);
return;
}
/* 读ID */
uint32_t nVendorID = GT911DrvReadVendorID();
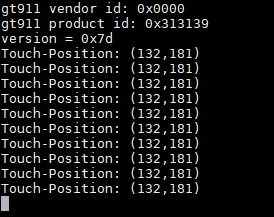
printf("gt911 vendor id: 0x%.4x\r\n", (int)nVendorID);
uint32_t nProductID = GT911DrvReadProductID();
printf("gt911 product id: 0x%.4x\r\n", (int)nProductID);
uint8_t nVersion = GT911DrvReadVersion();
printf("version = 0x%x\r\n", nVersion);
GT911DrvReadReg(0x8048, buf, 2);
gTP.wWidth = (unsigned short)((buf[1] << 8) | buf[0]);
GT911DrvReadReg(0x804A, buf, 2);
gTP.wHeight = (unsigned short)((buf[1] << 8) | buf[0]);
}
- 触摸设备的注册和获取
以面向对象的思想,构造了一个TouchDev结构体gTouchDev,代码如下:
static struct TouchDev gTouchDev = {
.name = "GT911",
.Init = GT911DrvInit,
.Read = GT911DrvRead
};
然后再以一个函数将此设备返回给上层应用:
struct TouchDev* TouchDevGet(void)
{
return &gTouchDev;
}
15.2.4 测试程序
app_test.c是测试程序,它会打印触摸点的信息,代码如下:
void TouchAppTest(void)
{
TouchDev *ptDev = TouchDevGet();
if(NULL == ptDev)
{
printf("Error. Not Found Touch Device!\r\n");
return;
}
ptDev->Init(ptDev);
uint16_t x = 0, y = 0;
while(1)
{
if(ptDev->Read(ptDev, &x, &y) == true)
{
printf("Touch-Position: (%d,%d)\r\n", x, y);
}
}
}
15.2.5 上机实验
在hal_entry.c中的hal_entry()函数中,初始化滴答定时器、初始化调试串口,然后调用TouchAppTest函数进行测试。
当触摸屏幕的时候,串口助手就会打印例如下图这样的点位坐标信息:文章来源:https://uudwc.com/A/qRjWM
 文章来源地址https://uudwc.com/A/qRjWM
文章来源地址https://uudwc.com/A/qRjWM